Устройство перемещения телескопической колонны. Высокая жесткость конструкции телескопической колонны
Устройство перемещения телескопической колонны
Использование: изобретение относится к устройству удлинения (перемещения) колонн, обеспечивающему возможность быть портативным, находясь в сложенном состоянии, при этом оно может формироваться в более длинную высокую колонну, чем обычная складывающаяся колонна, и может реализовать большую величину перемещения без увеличения веса колонны. Сущность изобретения: устройство перемещения содержит гибкий движущийся элемент, приводную часть для перемещения движущегося элемента; большое число центрирующих элементов, каждый из которых снабжен выполненными по их центру сквозными отверстиями для движущегося элемента, соединенных друг с другом и перемещающихся совместно с передвижением движущегося элемента, так что расстояние между соответствующими центрирующими элементами может изменяться, и средство, образующее проход, предназначенный для поддерживания и напряжения движения центрирующих элементов. 6 з.п. ф-лы, 10 ил.
Настоящее изобретение касается устройства для возвратно-поступательного перемещения (называемого в дальнейшем "устройством перемещения"), которое создает узел из длинной колонны или т.п. за счет его удлинения, но без увеличения веса.
Устройство перемещения, использующее гидравлический цилиндр и винтовой шток, в основном широко используется в таких областях, как телескопическая стрела крана, телескопическая колонна, домкраты и т.п. (1). Известное устройство перемещения выполнено так, что прочность на продольный изгиб движущегося возвратно-поступательного элемента (в дальнейшем называемого "движущимся элементом") обусловлена самими составляющими элементами, как то, цилиндром, штоком, винтовым штоком или стержнем, и т.п. которые образуют устройство перемещения. Последнее не имеет средств, усиливающих эти элементы. Если создано устройство перемещения, имеющее большую длину движения, то вес такого устройства неизбежно увеличивается. Хотя устройство перемещения с большой длиной перемещения теоретически может быть создано, однако, практически проблемы, касающиеся веса, портативности, удерживающих свойств и т.п. не могут быть решены. Кран-ускосина, использующий известное устройство перемещения, имеет длину вылета порядка от 20 м до 30 м. Однако, кран является такого типа, который погружен исключительно на раму гусеничной тележки или транспортера на гусеничном ходу. В данной ситуации домкрат типа винтового стержня имеет величину подъема в несколько метров в равновесии между задней длиной винтового стержня и глубиной приемного гнезда. Это объясняется тем, что, поскольку средства для обеспечения прочности на продольный изгиб обычного устройства перемещения для телескопического перемещения, не предусмотрены, несмотря на наибольшую важность прочности на продольный изгиб при создании гибкой конструкции, то собственный вес устройства должен быть увеличен. Известно устройство перемещения телескопической колонны, содержащее гибкий движущийся элемент, связанный с приводом с возможностью возвратно-поступательного перемещения, центрирующие элементы, каждый из которых выполнен с размещенным по центру сквозным отверстием для движущегося элемента, соединенные друг с другом с возможностью перемещения совместно с движущимся элементом и изменения расстояния между ними, и средство, образующее проход для поддерживания и направления движения центрирующих элементов при их перемещении (2). Известная конструкция имеет недостаточную жесткость. Технический результат настоящего изобретения заключается в повышении жесткости. Это достигается тем, что в описанном выше устройстве упомянутое средство образовано телескопически связанным между собой цилиндрами, движущийся элемент выполнен в виде гибкого винта с резьбовой канавкой на наружной поверхности, образованного путем наматывания узкого материала, имеющего соответствующую форму в поперечном сечении, в спираль, гибкий винт соединен передним концом с цилиндром наименьшего диаметра, а упомянутые цилиндры выполнены со сквозными отверстиями в днищах для свободного прохождения гибкого винта, при этом центрирующие элементы размещены в соответствующих цилиндрах, а упомянутый привод содержит вращающийся гаечный элемент, взаимодействующий с резьбовой канавкой гибкого винта со стороны его заднего конца. На каждом центрирующем элементе и соответствующем цилиндре выполнены соответственно шпонки и шпоночные канавки для поддерживания и направления движения центрирующих элементов и предотвращения относительного вращения между ними. Телескопически связанные между собой цилиндры выполнены в поперечном сечении некруглой формы, например, эллиптической, угловой, звездообразной для предотвращения относительного вращения цилиндров. Центрирующие элементы соединены друг с другом с помощью плоской пружины, спиральной пружины или струны или сочетания такой пружины со струной. Устройство может быть снабжено средством для намотки и укладки гибкого винта при перемещении его назад и подачи и сматывании при перемещении его вперед. Резьбовая канавка на наружной поверхности гибкого винта может быть выполнена в поперечном сечении, преимущественно, круглой, трапецеидальной или треугольной формы. Внутри образованного путем наматывания узкого материала гибкого винта размещен стержень-сердечник, имеющий соответствующую форму в поперечном сечении или проволоки-сердечники. Фиг.1 схема, иллюстрирующая принцип действия устройства. Фиг. 2 вид в сечении, показывающий принципиальную часть узла связи гибкого винта и гайки, использующихся в устройстве настоящего изобретения. Фиг.3 вид спереди в разрезе устройства, показывающий связь гибкого винта с приводом. Фиг.4 вид в разрезе, показывающий принципиальную часть устройства в положении, когда телескопическая колонна с гибким винтом раздвинута. Фиг. 5 вид в разрезе той же конструкции, что и на фиг.4, но в положении, в котором телескопическая колонна сложена. Фиг.6 вид в разрезе, выполненном по линии А-А на фиг.4 Фиг. 7 вид спереди в разрезе телескопической колонны, образованной телескопически соединенными цилиндрами, включая верхний цилиндр. Фиг.8 вид в сечении, выполненном по линии В-В на фиг.7. Фиг. 9 вид в частичном сечении и увеличенном масштабе, показывающий взаимосвязь между центрирующими элементами и соединительной струной, когда проход складывается. Фиг. 10 вид в частичном сечении и в увеличенном масштабе, показывающий эту же связь, но при раздвинутом проходе. Принцип действия устройства настоящего изобретения описывается ниже со ссылками на фиг.1. В соответствии с настоящим изобретением, гибкий движущийся элемент 1 поддерживает груз W, вертикально (направление оси Z) действующий на элемент 1, и обладает прочностью на продольный изгиб устройства. Считается, что если уравнение Эйлера применимо для длинной колонны (длинного элемента), то прочность на продольный изгиб длинной колонны обратно пропорциональна квадрату длины. Цель настоящего изобретения, направленная на достижение устройства перемещения, обладающего заданной прочностью на продольный изгиб, используя гибкий элемент, не может быть достигнута, если только промежуточная часть движущегося элемента 1 не будет поддерживаться. В настоящем изобретении этому вопросу как раз уделено внимание и промежуточная часть гибкого движущегося элемента в проходе 2 поддерживается с соответствующим шагом. Центрирующие элементы 3 используются для поддержания промежуточной части движущегося элемента 1. Термин "поддержание" означает, что движущийся элемент поддерживается так, чтобы не создавать позиционного отклонения (смещения) у движущегося элемента в направлении (плоскость X-Y) вертикально к нагрузке в системе координат. Средство образующее проход 2 для перемещения, показанный на фиг.1, удерживает и направляет центрирующие элементы 3, движущиеся и расположенные с соответствующим шагом. Поскольку, центрирующие элементы 3 соединены друг с другом с помощью соединительных струн 4, 4а (см. также фиг.9, 10), то они синхронно движутся в проходе 2 при перемещении вперед назад движущегося элемента 1 так, чтобы поддержать элемент 1 с соответствующим шагом в центре прохода 2 во время перемещения вперед движущегося элемента 1, и для замены прочности на продольный изгиб движущегося элемента 1 прочностью на продольный изгиб перекрытий, соответственно поддерживаемых центрирующими элементами 3, но не по всей длине движущегося элемента 1. Каждый из центрирующих элементов 3 снабжен сквозным отверстием 3а для свободного прохождения через него длинного элемента 1 и для его направления по центру; шпоночной канавкой 3b, служащей для запирания прохода 2; соединительными струнами 4, содержащими выпуклую плоскую спиральную пружину, обладающую саморазматывающим усилием, и дополнительную пружину 4а для определения шага центрирующих элементов 3 и для определения подачи соединительной струны на их длину (см. фиг.9, 10). Выпуклая соединительная струна 4 не вытягивается на всю длину, а закреплена на валу 4b вместе с дополнительной или вспомогательной струной 4а для гарантирования саморазматывающего усилия. Цифрой 2а обозначена выступающая шпоночная планка, выполненная на внутренней поверхности прохода 2 в соответствии со шпоночной канавкой 3b. Приводная часть 5 служит для перемещения вверх и вниз движущегося элемента 1. Приводная часть 5 содержит вращающуюся гайку, при этом движущийся элемент 1 является винтом, приводная часть может быть вращающимся подающим приводным роликом, если элемент 1 является струной или лентой, или вращающейся шестерней, если элемент 1 является зубчатой рейкой. Если движущийся элемент 1 является негибким элементом, то устройство перемещения настоящего изобретения также может применяться. Когда движущийся элемент является негибким элементом, то устройство настоящего изобретения может реализоваться в ходовом винте или винтовом домкрате, имеющем длинный ход подачи и более высокий ход подъема за счет использования более длинного и тонкого винтового движущегося элемента, чем в обычном механизме ходового винта, использующем жесткий винтовой стержень, или винтовом домкрате, применяющем жесткий винтовой стержень. Однако, если движущийся элемент 1 является негибким, то необходимо иметь пространство на заднем конце прохода под движущийся элемент 1. Если же подвижный элемент 1 является гибким элементом, то приемная часть, как например, катушка или аналогичное приспособление, размещается на конце прохода перемещения благодаря чему экономится пространство. Ниже приводится описание подвижного устройства настоящего изобретения, в котором используется гибкий движущийся элемент 1. На фиг.2 приведен пример механизма ходового финта, который используется в качестве гибкого подвижного элемента 1, т.е. гибкого винта (обозначенного в дальнейшем цифрой 1). Как показано на фиг.2, гибкий винт 1 содержит стальной узкий материал 1а, плотно завитый в длинную спираль, и имеющий резьбовую канавку 1b для передвижения шариков, выполненную на наружной периферии вдоль линии соединения узкого материала с целью формирования примера гибкого движущегося элемента настоящего изобретения. Пример, показанный на фиг.2, использует узкий материал 1, наружная поверхность которого предварительно обработана для получения резьбовой канавки так, чтобы резьбовая канавка 1b формировалась при скручивании узкого материала 1а в спираль, при этом последний может иметь соответствующую угловую форму в сечении, например, прямоугольную форму, трапециевидную форму и т.п. Хотя гибкий элемент 1, выполненный как описано выше, имеет по существу такой же внешний вид, что и винт, образованный обычным стержнем, однако, гибкий винт 1 обладает гибкостью в осевом направлении, благодаря тому, что он получен путем закручивания узкого материала 1а в спираль. Как показано на фиг.2, вращающаяся гайка, с которой взаимодействует винт 1, служит в качестве приводной части 5. Гайка содержит короткий цилиндрический корпус 5а, имеющий отверстие, диаметр которого обеспечивает свободное похождение гибкого вала 1, и много шариков 5b, располагающихся по спирали вдоль резьбовой канавки 1b на внутренней поверхности корпуса 5а и циркулирующих в корпусе 5а. Цифрой 5с обозначена наружная шестерня выполненная в виде фланца на наружной периферии корпуса 5а гайки так, чтобы обеспечить подвод вращательного усилия снаружи. Хотя гайка содержит вращающуюся гайку, имеющую шарики 5b, гаечный элемент 5а, в котором входящий винт (не показан) взаимодействует с винтовой канавкой 1b гибкого винта 1, спирально выполненной непосредственно на его внутренней поверхности, гаечный элемент 5а может иметь струну (не показана), выполненную спиральной из соответствующей искусственной смолы и прикрепленным к внутренней поверхности корпуса 5а гайки вместо шариков 5b, которая может использоваться с гибким винтом 1, применяющимся в настоящем изобретении. В качестве материала для струны может быть использован соответствующий металл, керамика или композитный материал на их основе, но отличный от искусственной смолы. Поскольку гибкий винт 1, образованный закручиванием узкого материала в спираль с целью образования длинного движущегося элемента, является полым, то внутрь гибкого винта 1 может вставляться сердечник (не показан) плотно контактирующий с его внутренней поверхностью. Примером такого сердечника может служить гибкая труба (не показана), имеющая винтового типа выпуклую полосу, взаимодействующую с резьбовой канавкой, выполненной вдоль линии стыка узкого материала 1а на внутренней стороне гибкого винта 1. Когда сердечником, вставленным в гибкий винт 1, является гибкая труба, то жидкость может нагнетаться в трубу, благодаря чему она может легко подаваться и удаляться, такая конструкция является полезной для достижения прочности на продольный изгиб, когда требуется намотать весь гибкий винт 1 на катушку или аналогичное приспособление или сматывать гибкий винт 1 с нее с сохранением прямолинейного состояния. Кроме того, сердечник может изготавливаться из сплава, обладающего памятью формы, а температурные условия, позволяющие памяти сплава вернуть линейную форму при определенном температурном режиме, создаются в части, где гибкий винт 1, намотанный на катушку или барабан, выпрямляется. На фиг.2 гаечный элемент, навинченный на гибкий винт 1 с помощью шариков 5b, нормально и реверсивно вращается в заданном положении за счет передачи вращательного выходного усилия от двигателя 5d гаечному элементу с тем, чтобы перемещать вперед и назад гибкий винт 1, который останавливается за счет наматывания его заднего конца 1b в проходе перемещения 2, как показано на фиг. 3. На фиг.3 цифрой 5c обозначена выходная шестерня. Эти элементы и гаечный элемент образуют приводную часть 5 перемещения винта 1. Как показано на фиг.3, корпус 5а гайки вращательно установлен в заданном положении на нижнем конце прохода перемещения 2 с помощью подшипника 5f или аналогичного приспособления. Гибкий винт 1 ввинчивается в гайку. Задний конец 1b гибкого приспособления. Гибкий винт 1 ввинчивается в гайку. Задний конец 1b гибкого винта, ввинченный в гайку, поворачивается на 90o и наматывается или змеевидно сворачивается сразу же ниже гайки, благодаря своей гибкости, а его передний конец 1а, проходящий через гайку, перемещается вперед и назад в проходе перемещения 2. Как показано на фиг.3 каждый из центрирующих элементов 3 выполнен так, что гибкий винт 1 проходит с возможностью перемещения через их центральную часть. Центрирующие элементы 3 соединены друг с другом с помощью соединительной струны 4 типа спиральной пружины. Однако, предпочтительно центрирующие элементы должны быть соединены друг с другом с помощью выпуклого соединения 4, обладающего саморазматывающим усилием, и вспомогательной струной 4а для определения длины, как показано на фиг.1. В устройстве, показанном на фиг.3, перемещаемый объект W, служащий в качестве груза, который нужно перемещать вперед и назад, установлен на переднем конце 1а гибкого винта 1, в результате чего объект W может двигаться в проходе перемещения 2 вместе с передним концом винта 1 за счет перемещения последнего в проходе 2. В этом устройстве используется длинный гибкий винт 1 для увеличения величины перемещения винта 1 и увеличения поднимаемой величины объекта W. Центрирующие элементы 3, подвижно контактирующие с наружной периферией винта 1 с соответствующим шагом, служат для поддерживания винта 1 по всей его длине с соответствующими интервалами по центру прохода 2 и для предотвращения изгибания винта 1, обусловленного действием нагрузки от объекта W. Каждый из центрирующих элементов 3 имеет сквозное отверстие 3с для направления гибкого винта 1 по центру и фиксируется и поддерживается на стороне его наружной периферии с помощью средства, образующего проход 2 перемещения винта 1 поверхностью стенки, с тем, чтобы иметь возможность скользящего передвижения в направление перемещения, используя взаимодействие шпонки 2а со шпоночной канавкой 3b, как показано на фиг.1. Большое число центрирующих элементов 3 поддерживается в свою очередь ниже объекта W с помощью соединений 4, каждое из которых имеет заданную длину, в результате чего они могут перемещаться и располагаться с соответствующим шагом в проходе 2 перемещения за счет перемещения вверх вниз 1. Таким образом, винт 1 поддерживается с интервалами центрирующих элементов в проходе 2 перемещения, не вызывая смещения его центра в поисках координат. Это позволяет устранить продольный изгиб винта 1, обусловленный грузом W. Как описано выше со ссылками на фиг.3, в устройстве настоящего изобретения, использующем гибкий винт, центр винта 1 поддерживается центрирующими элементами 3 в проходе 2 перемещения, при этом передний конец 1а является направляющим в перемещении со стороны подачи. Кроме того, поскольку гибкий винт 1 может свободно перемещаться вперед и назад, поддерживаемый при этом в его средних частях с соответствующим шагом, перемещение самого прохода 2 перемещения 2 делается гибким (подвижным) с помощью средства, состоящего из телескопических цилиндров 6, 7. как показано в качестве приема на фиг.4, 5, в результате чего устройство настоящего изобретения может использоваться в качестве механизма перемещения для установки, содержащей телескопический проход 2 перемещения в качестве телескопической колонны. Пример устройства настоящего изобретения, содержащего средство, образующее проход 2 перемещения, служащее в качестве колонны, образованной телескопически соединенными цилиндрами, описывается ниже со ссылками на фиг.4 6. На фиг. 4 цифры 6, 7. соответственно обозначают части телескопически соединенных цилиндров, имеющих различные диаметры; цилиндр 7 имеет меньший диаметр и вставлен в цилиндр 6, имеющий больший диаметр с возможностью вертикального скольжения, но несъемно. Хотя весь телескопический цилиндр, образующий проход 2 перемещения в устройстве перемещения, не показаны на чертеже, однако большое число цилиндров, имеющих различные диаметры, последовательно и свободно вставлены также, как цилиндры 6, 7. показанные на чертеже, для образования телескопического цилиндра. Каждый из цилиндров 6, 7. телескопического цилиндра имеет нижнюю плиту или днище a, наружные фланцы b, c, выполненные на верхнем и нижнем концах, и внутренний фланец d на их верхнем конце. Наружный фланец c с нижнего конца вставленного цилиндра и внутренний фланец d верхнего цилиндра служит для запирания обоих цилиндров. Буквой e обозначено сквозное отверстие для гибкого винта 1, выполненное в центре днища d каждого цилиндра. В настоящем изобретении обычная телескопическая колонна имеет конструкцию, в которой ходовой винт поддерживается только основанием каждого из цилиндров и тем самым не имеет большого удлинения и большого соотношения свободной длины к радиусу инерции. Каждый из цилиндров 6, 7. образующих телескопический цилиндр и большое число центрирующих элементов перемещается синхронно с формированием прохода 2 за счет телескопического перемещения и размещения с соответствующим шагом для поддержания средней части длинного тонкого движущегося элемента в виде гибкого винта. Настоящее изобретение обеспечивает формирование телескопической колонны, имеющей большую величину перемещения, т.е. высокое соотношение свободной длины к радиусу инерции, что может быть реализовано с помощью известных устройств. Получаемая телескопическая колонна обладает прочностью на продольный изгиб и изгибной жесткостью, удовлетворяющих практическим целям. Как показано на фиг.6, каждый из центрирующих элементов 3 является таким же, как показаны на фиг. 1 и 3, в том плане, что каждый из них имеет размер, обеспечивающий его плотную установку в цилиндре 6 и в том, что каждый из центрирующих элементов 3 снабжен шпоночными канавками 3b, свободно взаимодействующими с выступающими шпоночными планками 2а, выполненными на внутренней поверхности цилиндра 6, и сквозным отверстием 3а, выполненным в его цилиндре, для свободного прохождения через него и направления гибкого винта 1. Центрирующие элементы 3 установлены в каждом из цилиндров 6, 7. имеющих различные диаметры соответственно, имеют наружные диаметры, соответствующие внутренним диаметрам цилиндров 6, 7. Для практического использования предпочтительно, чтобы каждое сквозное отверстие 3а и отверстие для свободного прохождения гибкого винта 1 имело бы втулку, изготовленную из из материала, обладающего низким сопротивлением скольжению, или вращающуюся втулку с подшипником, взаимодействующую с гибким валом 1 (на чертеже не показано). В конструкции, показанной на фиг.4, 5 три центрирующих элемента установлены в каждом из цилиндров 6, 7 являющихся составными элементами телескопического цилиндра. Каждый из центрирующих элементов 3 соединен с верхним центрирующим элементом 3 с помощью соединительной струны 4, а самый верхний центрирующий элемент 3 соединен с нижней поверхностью днища а меньшего цилиндра, вставленного в рассматриваемый цилиндр, с помощью соединительной струны 4. Число центрирующих элементов 3, устанавливаемых в одном цилиндре может быть любым в зависимости от длины каждого цилиндра и поднимаемой нагрузки. В вышеприведенной конструкции, цилиндры 6, 7. телескопического цилиндра последовательно вставляются так, чтобы цилиндр, имеющий меньший диаметр, свободно вставляется в цилиндр большего диаметра. Когда цилиндр, имеющий меньший диаметр, выдвигается вверх под действием перемещения вверх гибкого винта 1, то наружный фланец c на нижнем конце этого цилиндра взаимодействует с внутренним фланцем d на верхнем конце следующего цилиндра, имеющего больший диаметр. Нижние концы цилиндров меньшего диаметра последовательно взаимодействуют и тянут вверх верхние концы цилиндров большего диаметра для формирования прохода перемещения за счет телескопического движения. В устройстве настоящего изобретения, показанном на фиг.4, передний конец 1а (не показан) гибкого винта 1 может первым крепится к задней стороне днища ["a"] цилиндра, имеющего наименьший диаметр. Поскольку днища ["a"] всех остальных цилиндров и центрирующие элементы при этом имеют сквозные отверстия e и 3а соответственно для свободного прохождения через них винта 1, то последний подвижно удерживается по центру каждого из цилиндров за исключением самого верхнего цилиндра и проходит весь телескопический цилиндр. Хотя на фиг. 5 не показано, задний конец 1b гибкого винта 1 наматывается на приемный барабан, установленном в пространстве устройства, на котором смонтирован вертикально самый нижний цилиндр. Хотя на чертеже не показано, предпочтительно иметь трубу для свободного прохождения через нее гибкого винта через центр самого верхнего цилиндра вместо центрирующего элемента. С другой стороны, гаечный элемент установлен в отделении устройства, в результате чего вращение передается от двигателя 5d, снабженного системой передач, показанной на фиг.4. Система передач может иметь любую требуемую конструкцию. Работа устройства осуществляется следующим образом. В вышеприведенной конструкции, когда двигатель 5 нормально вращается и вращение передается гаечному элементу 5а в состоянии, когда цилиндры 6, 7. не выдвинуты, как показано на фиг.5, то перемещение вверх верхнего конца 1а (не показан) гибкого винта 1 начинается за счет вращения гаечного элемента 5а. В состоянии, показанном на фиг. 6, в котором телескопический цилиндр сложен, центрирующие элементы 3 в цилиндрах 6, 7. располагаются слоями между нижней стороной днища ["а"] верхнего цилиндра и верхней поверхностью днища а нижнего цилиндра. Перемещение вверх гибкого винта 1 вызывает перемещение вверх цилиндра, имеющего наименьший диаметр в следующем цилиндре, имеющим больший диаметр. Когда наружный фланец с на нижнем конце цилиндра, имеющего меньший диаметр, достигает внутреннего фланца b на верхнем конце цилиндра, имеющего больший диаметр, то цилиндр 6, имеющий больший диаметр, перемещается вверх за счет перемещения вверх гибкого винта 1. Перемещение гибкого винта 1 вверх заставляет цилиндры, имеющие меньший диаметр, последовательно перемещать вверх цилиндры, имеющие большие диаметры. Выдвинутый таким образом телескопический цилиндр имеет проход перемещения 2 для винта 1, сформированный в цилиндре и обеспечивается внешний вид раздвинутой вертикальной колонны. В то же время центрирующие элементы 3 в каждом из цилиндров 6, 7. перемещаются вверх в цилиндре, в котором центрирующие элементы 3 установлены, за счет перемещения вверх цилиндра выше рассматриваемого цилиндра и размещаются с равными шагами в соответствии с длиной каждого соединения 4, 4а. В процессе вышеуказанного удлинения, гибкий винт 1 перемещается вертикально вверх за счет центрирующих элементов, не вызывая каких-либо смещений в плоскости XY. Таким образом, гибкий винт 1 поддерживается в нескольких местах своей средней части с соответствующими интервалами с помощью днища а каждого цилиндра и большим числом центрирующих элементов 3, установленных в каждом из цилиндров 6, 7. Когда гибкий винт 1 удлиняется, сопровождая перемещение вверх каждого из цилиндров 6, 7. то многочисленные центрирующие элементы 3, установленные в каждом из цилиндров 6, 7. последовательно движутся в каждом из цилиндров и располагаются с соответствующим шагом в каждом из цилиндров 6, 7. Это значительно повышает прочность на продольный изгиб всего гибкого винта 1. В этом случае, каждый из цилиндров должен быть выполнен так, чтобы он имел толщину и диаметр, достаточные для противостояния боковой нагрузке. Однако, поскольку изгибная жесткость цилиндра пропорциональна диаметру в кубе и толщине, то эта цель достигается за счет применения цилиндра, имеющего относительно небольшую толщину и относительно большой диаметр в диапазоне, не создающем местного продольного изгиба, что приводит к снижению общего веса. Когда колонна, образованная выдвинутыми цилиндрами 6, 7. т.е. проход перемещения 2, сформированный телескопическим движением, складывается и складируется, то гаечный элемент 5 вращается в направлении, обратном тому, что при перемещении вверх, в результате чего передний конец 1а гибкого винта 1 движется вниз, а гибкий винт 1 наматывается на барабан в отделение устройства. Это приводит к тому, что цилиндры 6, 7. последовательно возвращаются и входят в цилиндры, имеющие большие диаметры. Когда цилиндры движутся вниз и сжимаются со стороны меньшего диаметра, то центрирующие элементы 3 в каждом из цилиндров, перемещаются в них в сторону их днища под действием днища а верхнего цилиндра, сопровождающего перемещение вниз каждого из цилиндров 6, 7. В устройстве перемещения настоящего изобретения, содержащим в качестве главных элементов гибкий винт 1, служащий в качестве движущегося элемента, гаечный элемент 5а, являющийся движущей силой перемещения, и центрирующие элементы 3, проход перемещения 2, образованный большим числом цилиндров 6, 7. составленных телескопически, формируется за счет телескопического перемещения, синхронно с движением винта 1. Устройство настоящего изобретения может использоваться, таким образом, как механизм телескопической колонны, содержащий телескопический цилиндр в качестве телескопической колонны. Когда каждый из цилиндров 6, 7. телескопического цилиндра имеет цилиндрическую форму, то запирающий механизма образуется за счет взаимодействия между шпонкой и шпоночной канавкой, соответственно выполненных на внутренней и наружной поверхностях каждого цилиндра. Однако, если каждый из цилиндров является угловой формы, то запирающий механизм не нужен. Наружная поверхность на нижнем конце каждого цилиндра и внутренняя поверхность на их верхнем конце может быть выполнена на конус для более близкого соединения соответствующих цилиндров, когда телескопический цилиндр образует вертикальную колонну за счет удлинения. На фиг.8 наглядно показано соединение всех цилиндров 6, 7. между собой. Однако на этой фигуре показана другая конструкция движущегося элемента 1. В качестве движущего элемента 1 использован выпуклый элемент (см. фиг.7, 8). В этом случае, приводная часть 5 перемещения содержит, например, приводной ролик 5h и прижимной ролик 5g, установленный напротив приводного ролика 5h с целью зажатия между ними выпуклого движущегося элемента 1 и для его перемещения вперед и назад. Цифрой 5i обозначен направляющий ролик. Форма сквозных отверстий 3а, выполненных в центре каждого днища а цилиндров 6, 7. и центрирующих элементов 3, соответствует форме в поперечном сечении движущегося элемента 1. Другие части являются такими же, как в устройстве на фиг.4-6. В устройстве перемещения настоящего изобретения проход 2 перемещения, образованный телескопическим цилиндром, выполнен так, чтобы обладать изгибной жесткостью, требующейся для гибкой конструкции, а движущийся элемент, гибкий винт, движущийся в проводе перемещения, выполнен так, чтобы иметь прочность на продольный изгиб, который может быть осуществлен весом цилиндра, собственным весом гибкого винта и нагрузкой от осветительной лампы или т.п. находящимся на верху телескопической колонны и действующим на нее в осевом направлении. Таким образом, проход перемещения и движущийся элемент обладают изгибной жесткостью и прочностью на продольный изгиб, которые требуются для гибкой конструкции. Например, большое число центрирующих элементов, скользящих в осевом направлении цилиндров и каждый из которых снабжен выполненным по его центру сквозным отверстием для гибкого винта, предусмотрено в каждом из цилиндров, формирующих проход перемещения, и соединены, например, с помощью плоской спиральной пружины и струны, в результате чего центрирующие элементы блокируют перемещение гибкого винта и располагаются с заданными интервалами, когда телескопическая колонна раздвигается. Прочность на продольный изгиб движущегося элемента может таким образом, существенно увеличиваться за счет функционирования центрирующих элементов по сравнению со случаем без центрирующих элементов. Это объясняется тем, что поскольку прочность на продольный изгиб гибкой конструкции обратно пропорциональна квадрату длины конструкции, что в общем известно, длина гибкого винта, связанная с прочностью на продольный изгиб, приближается к расстоянию между соответствующими центрирующими элементами, а не ко всей длине винта, благодаря центрирующим элементам для закрепления прохода перемещения для гибкого винта в центре каждого цилиндра, имеющего достаточную изгибную жесткость. Это положение было экспериментально подтверждено изобретателями. Хотя допустимая подъемная нагрузка винтового домкрата, имеющего по существу трапецеидальный винт, уменьшается с увеличением длины винтового стержня, если диаметр винтового стержня остается тем же, то наличие прохода перемещения и центрирующих элементов настоящего изобретения позволяет сохранить допустимую подъемную нагрузку постоянной несмотря на дину винтового стержня. Когда используется гибкий движущийся элемент, то настоящее изобретение имеет большое преимущество, заключающееся в том, что длинная телескопическая колонна может формироваться путем наматывания или подачи этого элемента. Поскольку гибкий подвижной элемент обычно обладает более низкой прочностью на продольный изгиб, чем жесткие подвижные элементы, то прочность на продольный изгиб должна быть увеличена за счет использования конструкции настоящего изобретения. Как отмечалось выше, в устройстве настоящего изобретения средство, образующее проход перемещения и движущийся элемент соответственно обладают изгибной жесткостью и прочностью на продольный изгиб, причем последняя может быть еще повышена путем сочетания подвижных центрирующих элементов. Таким образом, обеспечивается возможность получения идеальной длинной телескопической колонны, имеющей высокий коэффициент удлинения, легкий вес и большой нагружаемый вес. 2 4Формула изобретения
1. Устройство перемещения телескопической колонны, содержащее гибкий движущийся элемент, связанный с приводом с возможностью возвратно-поступательного перемещения, центрирующие элементы, каждый из которых выполнен с размещенным по центру сквозным отверстием для движущегося элемента, соединенные друг с другом с возможностью перемещения совместно с движущимся элементом и изменения расстояния между ними, и средство, образующее проход для поддержания и направления движения центрирующих элементов при их перемещении, отличающееся тем, что упомянутое средство образовано телескопически связанными между собой цилиндрами, движущийся элемент выполнен в виде гибкого винта с резьбовой канавкой на наружной поверхности, образованного путем наматывания узкого материала, имеющего соответствующую форму в поперечном сечении, в спираль, гибкий винт соединен передним концом с цилиндром наименьшего диаметра, а упомянутые цилиндры выполнены со сквозными отверстиями в днищах для свободного прохождения гибкого винта, при этом центрирующие элементы размещены в соответствующих цилиндрах, а упомянутый привод содержит вращающийся гаечный элемент, взаимодействующий с резьбовой канавкой гибкого винта со стороны его заднего конца. 2. Устройство по п.1, отличающееся тем, что на каждом центрирующем элементе и соответствующем цилиндре выполнены соответственно шпонки и шпоночные канавки для поддерживания и направления движения центрирующих элементов и предотвращения относительного вращения между ними. 3. Устройство по п. 1, отличающееся тем, что телескопически связанные между собой цилиндры выполнены в поперечном сечении некруглой формы, например эллиптической, угловой, звездообразной или аналогичной форм для предотвращения относительного вращения цилиндров. 4. Устройство по п.1, отличающееся тем, что центрирующие элементы соединены друг с другом с помощью плоской пружины, спиральной пружины или струны или сочетания такой пружины со струной. 5. Устройство по п.1, отличающееся тем, что оно снабжено средством для намотки и укладки гибкого винта при перемещении его назад и подачи и сматывания при перемещении его вперед. 6. Устройство по п. 1, отличающееся тем, что резьбовая канавка на наружной поверхности гибкого винта выполнена в поперечном сечении преимущественно круглой, трапецеидальной или треугольной формы. 7. Устройство по п.1, отличающееся тем, что внутри образованного путем наматывания узкого материала гибкого винта размещен стержень-сердечник, имеющий соответствующую форму в поперечном сечении или проволоки-сердечники.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7, Рисунок 8, Рисунок 9, Рисунок 10www.findpatent.ru
Сплошные колонны - Центрально сжатые колонны - Колонны
Типы сечений
Стержень сплошной колонны образуется из одного или нескольких прокатных профилей или листов, соединяемых при помощи сварки или заклепок. Типы сечений сплошных колонн показаны на фигуре. Наиболее рациональным с точки зрения работы материала является трубчатое сечение, которое, однако, мало применяется на практике.
Основным сечением сплошных центрально сжатых колонн является сварное двутавровое сечение, составленное из трех листов, хотя в нем и не соблюдается полностью условие равноустойчивости. Одиночный прокатный двутавр редко применяется в качестве сжатого элемента вследствие значительной разницы в моментах инерции Jx и Jу.
Он может применяться как самостоятельное сечение только в колоннах, раскрепленных по высоте перпендикулярно оси у. В противном случае он требует усиления листами.
Сечения центрально сжатых сплошных колонн

Сварные двутавровые сечения из трех элементов могут изготовляться с широким применением автоматической сварки; доступность всех поверхностей стержня упрощает конструкцию сопряжений с примыкающими элементами и, следовательно, ускоряет и удешевляет изготовление и монтаж.
В отдельных случаях применяются сечения, состоящие из трех прокатных профилей. Однако такие селения тяжелее обычных.
Сплошные клепаные колонны состоят из листов и уголков.
Расчет и конструирование стержня сплошных колонн
Расчет колонны начинается с определения действующих на колонну нагрузок. Далее, приступая к подбору сечения, вычисляют необходимую площадь сечения стержня по формуле (2.VIII).
Для этого предварительно задаются приближенным значением коэффициента продольного изгиба: φ = 0,75 / 0,85.
Размеры сечения назначают, исходя из следующих соображений. Для поясов применяют листы толщиной δ = 8 / 40 мм, а для стенки — толщиной δ = 6 / 16 мм в зависимости от мощности колонны. Высота сечения колонны h в сооружениях обычного типа, т. е. при высоте колонн Н = 10 / 20 м, принимается не менее ((1/15) / (1/20)) H.
Во избежание потери местной устойчивости (местного выпучивания) поясных листов от нормальных напряжений ширина неукрепленной выступающей части пояса не должна превышать 15 его толщин, т. е. b < 30δ (для стали Ст. 3).
По этим же соображениям, согласно НиТУ, отношение высоты стенки к ее толщине (h/δ) не должно превышать 70 (см. § 29, п. 2).
При больших соотношениях устойчивость стенки не обеспечивается и ее необходимо укреплять парным продольным ребром жесткости; кроме того, ставятся поперечные ребра, которые размещаются по высоте колонны не реже чем через 3h.
Ребра жесткости колонны

Размеры поперечных и продольных ребер в сварных колоннах устанавливаются из конструктивных, соображений: ширина поперечного pe6pa bp ≥ hст/30 + 40мм, толщина δр ≥ bp/15; ширина продольного ребра bр = 10δр, толщина δр ≥ 3/4δст. Продольные ребра предохраняют стенку от волнообразного выпучивания, а поперечные ребра повышают жесткость сечения, укрепляя пояса.
Сечение клепаных колонн образуется из листа (стенки) и четырех неравнобоких уголков, приклепанных к стенке малыми полками. Это сечение может быть иногда усилено поясными листами, причем ширина неокаймленного свеса листа, считая от ближайшего ряда заклепок, не должна превышать 15 δ.
Укрепление стенки клепаных колонн ребрами жесткости (из уголков) производится аналогично укреплению сварных.
Назначив размеры сечения, удовлетворяющие конструктивным требованиям, определяют для колонны действительную гибкость X и соответствующий ей коэффициент после чего производят проверку напряжения по формуле (1.VIII).
В целях обеспечение нормальной эксплуатации НиТУ ограничивают для колонн и их элементов предельную гибкость.
Предельная гибкость колонн
| Наименование конструкций | Элементы конструкции | Предельная гибкость |
| Колонны и стойки | Основные | 120 |
| То же | Второстепенные (стойки стенового каркаса, стойки фонарей, элементы решеток колонн) | 150 |
Соединение элементов сечения между собой осуществляют в сварных колоннах непрерывными швами, принимая hш — 0,5δст (6 — 10 мм). При автоматической сварке поясные швы должны иметь одинаковую толщину по всей длине стержня; при ручной сварке рекомендуется увеличивать толщину этих швов у мест примыкания балок и ригелей, а также у базы (на участках длиной около 1 м).
В клепаных колоннах поясные заклепки ставят с максимальным шагом, но не более чем через 18 δмин, где δмин — наименьшая из толщин склепываемых элементов.
Пример 1. Требуется подобрать сечение стержня колонны, нагруженной расчетной нагрузкой N = 292 г, приложенной вертикально в центре оголовка. Высота колонны Н = 7,2 м. Колонна имеет башмак с жестким защемлением в обоих направлениях, закрепление верхнего конца шарнирное. Сечение стержня двутавровое сварное. Материал Ст. 3. Коэффициент условий работы m = 1.
Излишний материал в сечении

Решение. В соответствии с условиями закрепления концов колонны определяем расчетную длину стержня:

Задаемся предварительно коэффициентом φ = 0,75.
Определяем по формуле (2.VIII) требуемую площадь сечения:

Распределяем найденную площадь Fтр по элементам сечения:
пояса 2 листа 36 X 2 = 144 см2
стенка лист 40 X 1 = 40 см2
Итого 184 см2
Для определения гибкости стержня вычисляем моменты и радиусы инерции сечения:

Наибольшая гибкость колонны

следовательно, коэффициент продольного изгиба φγ = 0,875.
Наибольшее напряжение, соответствующее наибольшей гибкости, находим по формуле (1.VIII):

Неполное использование расчетного сопротивления указывает на наличие излишнего материала в сечении. Поэтому уменьшаем толщину поясов и стенки на 2 мм, не изменяя для сохранения жесткости ширины и высоты сечения. Производим перерасчет площади сечения и расчетного напряжения:

«Проектирование стальных конструкций»,К.К.Муханов

Как и в сплошных колоннах, подбор сечения стержня сквозной колонны начинают с определения необходимой площади сечения, исходя из расчетной нагрузки и расчетного сопротивления материала. Для этого предварительно задаются величиной коэффициента φ = 0,7 / 0,9. После этого определяют требуемую площадь сечения одной ветви по формуле По найденной площади подбирают по сортаменту ближайший номер швеллера или…

Типы сечений и решеток Стержень сквозной колонны состоит из двух или нескольких прокатных профилей, соединенных между собой в плоскостях полок планками или решетками. Сквозная колонна с планками Основным преимуществом сквозных колонн является возможность соблюдения в них условия равноустойчивости. Сквозные колонны достаточно экономичны по расходу металла. В то же время они более трудоемки в изготовлении, так…
www.ktovdome.ru
устройство перемещения телескопической колонны - патент РФ 2062749
Использование: изобретение относится к устройству удлинения (перемещения) колонн, обеспечивающему возможность быть портативным, находясь в сложенном состоянии, при этом оно может формироваться в более длинную высокую колонну, чем обычная складывающаяся колонна, и может реализовать большую величину перемещения без увеличения веса колонны. Сущность изобретения: устройство перемещения содержит гибкий движущийся элемент, приводную часть для перемещения движущегося элемента; большое число центрирующих элементов, каждый из которых снабжен выполненными по их центру сквозными отверстиями для движущегося элемента, соединенных друг с другом и перемещающихся совместно с передвижением движущегося элемента, так что расстояние между соответствующими центрирующими элементами может изменяться, и средство, образующее проход, предназначенный для поддерживания и напряжения движения центрирующих элементов. 6 з.п. ф-лы, 10 ил. Настоящее изобретение касается устройства для возвратно-поступательного перемещения (называемого в дальнейшем "устройством перемещения"), которое создает узел из длинной колонны или т.п. за счет его удлинения, но без увеличения веса. Устройство перемещения, использующее гидравлический цилиндр и винтовой шток, в основном широко используется в таких областях, как телескопическая стрела крана, телескопическая колонна, домкраты и т.п. (1). Известное устройство перемещения выполнено так, что прочность на продольный изгиб движущегося возвратно-поступательного элемента (в дальнейшем называемого "движущимся элементом") обусловлена самими составляющими элементами, как то, цилиндром, штоком, винтовым штоком или стержнем, и т.п. которые образуют устройство перемещения. Последнее не имеет средств, усиливающих эти элементы. Если создано устройство перемещения, имеющее большую длину движения, то вес такого устройства неизбежно увеличивается. Хотя устройство перемещения с большой длиной перемещения теоретически может быть создано, однако, практически проблемы, касающиеся веса, портативности, удерживающих свойств и т.п. не могут быть решены. Кран-ускосина, использующий известное устройство перемещения, имеет длину вылета порядка от 20 м до 30 м. Однако, кран является такого типа, который погружен исключительно на раму гусеничной тележки или транспортера на гусеничном ходу. В данной ситуации домкрат типа винтового стержня имеет величину подъема в несколько метров в равновесии между задней длиной винтового стержня и глубиной приемного гнезда. Это объясняется тем, что, поскольку средства для обеспечения прочности на продольный изгиб обычного устройства перемещения для телескопического перемещения, не предусмотрены, несмотря на наибольшую важность прочности на продольный изгиб при создании гибкой конструкции, то собственный вес устройства должен быть увеличен. Известно устройство перемещения телескопической колонны, содержащее гибкий движущийся элемент, связанный с приводом с возможностью возвратно-поступательного перемещения, центрирующие элементы, каждый из которых выполнен с размещенным по центру сквозным отверстием для движущегося элемента, соединенные друг с другом с возможностью перемещения совместно с движущимся элементом и изменения расстояния между ними, и средство, образующее проход для поддерживания и направления движения центрирующих элементов при их перемещении (2). Известная конструкция имеет недостаточную жесткость. Технический результат настоящего изобретения заключается в повышении жесткости. Это достигается тем, что в описанном выше устройстве упомянутое средство образовано телескопически связанным между собой цилиндрами, движущийся элемент выполнен в виде гибкого винта с резьбовой канавкой на наружной поверхности, образованного путем наматывания узкого материала, имеющего соответствующую форму в поперечном сечении, в спираль, гибкий винт соединен передним концом с цилиндром наименьшего диаметра, а упомянутые цилиндры выполнены со сквозными отверстиями в днищах для свободного прохождения гибкого винта, при этом центрирующие элементы размещены в соответствующих цилиндрах, а упомянутый привод содержит вращающийся гаечный элемент, взаимодействующий с резьбовой канавкой гибкого винта со стороны его заднего конца. На каждом центрирующем элементе и соответствующем цилиндре выполнены соответственно шпонки и шпоночные канавки для поддерживания и направления движения центрирующих элементов и предотвращения относительного вращения между ними. Телескопически связанные между собой цилиндры выполнены в поперечном сечении некруглой формы, например, эллиптической, угловой, звездообразной для предотвращения относительного вращения цилиндров. Центрирующие элементы соединены друг с другом с помощью плоской пружины, спиральной пружины или струны или сочетания такой пружины со струной. Устройство может быть снабжено средством для намотки и укладки гибкого винта при перемещении его назад и подачи и сматывании при перемещении его вперед. Резьбовая канавка на наружной поверхности гибкого винта может быть выполнена в поперечном сечении, преимущественно, круглой, трапецеидальной или треугольной формы. Внутри образованного путем наматывания узкого материала гибкого винта размещен стержень-сердечник, имеющий соответствующую форму в поперечном сечении или проволоки-сердечники. Фиг.1 схема, иллюстрирующая принцип действия устройства. Фиг. 2 вид в сечении, показывающий принципиальную часть узла связи гибкого винта и гайки, использующихся в устройстве настоящего изобретения. Фиг.3 вид спереди в разрезе устройства, показывающий связь гибкого винта с приводом. Фиг.4 вид в разрезе, показывающий принципиальную часть устройства в положении, когда телескопическая колонна с гибким винтом раздвинута. Фиг. 5 вид в разрезе той же конструкции, что и на фиг.4, но в положении, в котором телескопическая колонна сложена. Фиг.6 вид в разрезе, выполненном по линии А-А на фиг.4 Фиг. 7 вид спереди в разрезе телескопической колонны, образованной телескопически соединенными цилиндрами, включая верхний цилиндр. Фиг.8 вид в сечении, выполненном по линии В-В на фиг.7. Фиг. 9 вид в частичном сечении и увеличенном масштабе, показывающий взаимосвязь между центрирующими элементами и соединительной струной, когда проход складывается. Фиг. 10 вид в частичном сечении и в увеличенном масштабе, показывающий эту же связь, но при раздвинутом проходе. Принцип действия устройства настоящего изобретения описывается ниже со ссылками на фиг.1. В соответствии с настоящим изобретением, гибкий движущийся элемент 1 поддерживает груз W, вертикально (направление оси Z) действующий на элемент 1, и обладает прочностью на продольный изгиб устройства. Считается, что если уравнение Эйлера применимо для длинной колонны (длинного элемента), то прочность на продольный изгиб длинной колонны обратно пропорциональна квадрату длины. Цель настоящего изобретения, направленная на достижение устройства перемещения, обладающего заданной прочностью на продольный изгиб, используя гибкий элемент, не может быть достигнута, если только промежуточная часть движущегося элемента 1 не будет поддерживаться. В настоящем изобретении этому вопросу как раз уделено внимание и промежуточная часть гибкого движущегося элемента в проходе 2 поддерживается с соответствующим шагом. Центрирующие элементы 3 используются для поддержания промежуточной части движущегося элемента 1. Термин "поддержание" означает, что движущийся элемент поддерживается так, чтобы не создавать позиционного отклонения (смещения) у движущегося элемента в направлении (плоскость X-Y) вертикально к нагрузке в системе координат. Средство образующее проход 2 для перемещения, показанный на фиг.1, удерживает и направляет центрирующие элементы 3, движущиеся и расположенные с соответствующим шагом. Поскольку, центрирующие элементы 3 соединены друг с другом с помощью соединительных струн 4, 4а (см. также фиг.9, 10), то они синхронно движутся в проходе 2 при перемещении вперед назад движущегося элемента 1 так, чтобы поддержать элемент 1 с соответствующим шагом в центре прохода 2 во время перемещения вперед движущегося элемента 1, и для замены прочности на продольный изгиб движущегося элемента 1 прочностью на продольный изгиб перекрытий, соответственно поддерживаемых центрирующими элементами 3, но не по всей длине движущегося элемента 1. Каждый из центрирующих элементов 3 снабжен сквозным отверстием 3а для свободного прохождения через него длинного элемента 1 и для его направления по центру; шпоночной канавкой 3b, служащей для запирания прохода 2; соединительными струнами 4, содержащими выпуклую плоскую спиральную пружину, обладающую саморазматывающим усилием, и дополнительную пружину 4а для определения шага центрирующих элементов 3 и для определения подачи соединительной струны на их длину (см. фиг.9, 10). Выпуклая соединительная струна 4 не вытягивается на всю длину, а закреплена на валу 4b вместе с дополнительной или вспомогательной струной 4а для гарантирования саморазматывающего усилия. Цифрой 2а обозначена выступающая шпоночная планка, выполненная на внутренней поверхности прохода 2 в соответствии со шпоночной канавкой 3b. Приводная часть 5 служит для перемещения вверх и вниз движущегося элемента 1. Приводная часть 5 содержит вращающуюся гайку, при этом движущийся элемент 1 является винтом, приводная часть может быть вращающимся подающим приводным роликом, если элемент 1 является струной или лентой, или вращающейся шестерней, если элемент 1 является зубчатой рейкой. Если движущийся элемент 1 является негибким элементом, то устройство перемещения настоящего изобретения также может применяться. Когда движущийся элемент является негибким элементом, то устройство настоящего изобретения может реализоваться в ходовом винте или винтовом домкрате, имеющем длинный ход подачи и более высокий ход подъема за счет использования более длинного и тонкого винтового движущегося элемента, чем в обычном механизме ходового винта, использующем жесткий винтовой стержень, или винтовом домкрате, применяющем жесткий винтовой стержень. Однако, если движущийся элемент 1 является негибким, то необходимо иметь пространство на заднем конце прохода под движущийся элемент 1. Если же подвижный элемент 1 является гибким элементом, то приемная часть, как например, катушка или аналогичное приспособление, размещается на конце прохода перемещения благодаря чему экономится пространство. Ниже приводится описание подвижного устройства настоящего изобретения, в котором используется гибкий движущийся элемент 1. На фиг.2 приведен пример механизма ходового финта, который используется в качестве гибкого подвижного элемента 1, т.е. гибкого винта (обозначенного в дальнейшем цифрой 1). Как показано на фиг.2, гибкий винт 1 содержит стальной узкий материал 1а, плотно завитый в длинную спираль, и имеющий резьбовую канавку 1b для передвижения шариков, выполненную на наружной периферии вдоль линии соединения узкого материала с целью формирования примера гибкого движущегося элемента настоящего изобретения. Пример, показанный на фиг.2, использует узкий материал 1, наружная поверхность которого предварительно обработана для получения резьбовой канавки так, чтобы резьбовая канавка 1b формировалась при скручивании узкого материала 1а в спираль, при этом последний может иметь соответствующую угловую форму в сечении, например, прямоугольную форму, трапециевидную форму и т.п. Хотя гибкий элемент 1, выполненный как описано выше, имеет по существу такой же внешний вид, что и винт, образованный обычным стержнем, однако, гибкий винт 1 обладает гибкостью в осевом направлении, благодаря тому, что он получен путем закручивания узкого материала 1а в спираль. Как показано на фиг.2, вращающаяся гайка, с которой взаимодействует винт 1, служит в качестве приводной части 5. Гайка содержит короткий цилиндрический корпус 5а, имеющий отверстие, диаметр которого обеспечивает свободное похождение гибкого вала 1, и много шариков 5b, располагающихся по спирали вдоль резьбовой канавки 1b на внутренней поверхности корпуса 5а и циркулирующих в корпусе 5а. Цифрой 5с обозначена наружная шестерня выполненная в виде фланца на наружной периферии корпуса 5а гайки так, чтобы обеспечить подвод вращательного усилия снаружи. Хотя гайка содержит вращающуюся гайку, имеющую шарики 5b, гаечный элемент 5а, в котором входящий винт (не показан) взаимодействует с винтовой канавкой 1b гибкого винта 1, спирально выполненной непосредственно на его внутренней поверхности, гаечный элемент 5а может иметь струну (не показана), выполненную спиральной из соответствующей искусственной смолы и прикрепленным к внутренней поверхности корпуса 5а гайки вместо шариков 5b, которая может использоваться с гибким винтом 1, применяющимся в настоящем изобретении. В качестве материала для струны может быть использован соответствующий металл, керамика или композитный материал на их основе, но отличный от искусственной смолы. Поскольку гибкий винт 1, образованный закручиванием узкого материала в спираль с целью образования длинного движущегося элемента, является полым, то внутрь гибкого винта 1 может вставляться сердечник (не показан) плотно контактирующий с его внутренней поверхностью. Примером такого сердечника может служить гибкая труба (не показана), имеющая винтового типа выпуклую полосу, взаимодействующую с резьбовой канавкой, выполненной вдоль линии стыка узкого материала 1а на внутренней стороне гибкого винта 1. Когда сердечником, вставленным в гибкий винт 1, является гибкая труба, то жидкость может нагнетаться в трубу, благодаря чему она может легко подаваться и удаляться, такая конструкция является полезной для достижения прочности на продольный изгиб, когда требуется намотать весь гибкий винт 1 на катушку или аналогичное приспособление или сматывать гибкий винт 1 с нее с сохранением прямолинейного состояния. Кроме того, сердечник может изготавливаться из сплава, обладающего памятью формы, а температурные условия, позволяющие памяти сплава вернуть линейную форму при определенном температурном режиме, создаются в части, где гибкий винт 1, намотанный на катушку или барабан, выпрямляется. На фиг.2 гаечный элемент, навинченный на гибкий винт 1 с помощью шариков 5b, нормально и реверсивно вращается в заданном положении за счет передачи вращательного выходного усилия от двигателя 5d гаечному элементу с тем, чтобы перемещать вперед и назад гибкий винт 1, который останавливается за счет наматывания его заднего конца 1b в проходе перемещения 2, как показано на фиг. 3. На фиг.3 цифрой 5c обозначена выходная шестерня. Эти элементы и гаечный элемент образуют приводную часть 5 перемещения винта 1. Как показано на фиг.3, корпус 5а гайки вращательно установлен в заданном положении на нижнем конце прохода перемещения 2 с помощью подшипника 5f или аналогичного приспособления. Гибкий винт 1 ввинчивается в гайку. Задний конец 1b гибкого приспособления. Гибкий винт 1 ввинчивается в гайку. Задний конец 1b гибкого винта, ввинченный в гайку, поворачивается на 90o и наматывается или змеевидно сворачивается сразу же ниже гайки, благодаря своей гибкости, а его передний конец 1а, проходящий через гайку, перемещается вперед и назад в проходе перемещения 2. Как показано на фиг.3 каждый из центрирующих элементов 3 выполнен так, что гибкий винт 1 проходит с возможностью перемещения через их центральную часть. Центрирующие элементы 3 соединены друг с другом с помощью соединительной струны 4 типа спиральной пружины. Однако, предпочтительно центрирующие элементы должны быть соединены друг с другом с помощью выпуклого соединения 4, обладающего саморазматывающим усилием, и вспомогательной струной 4а для определения длины, как показано на фиг.1. В устройстве, показанном на фиг.3, перемещаемый объект W, служащий в качестве груза, который нужно перемещать вперед и назад, установлен на переднем конце 1а гибкого винта 1, в результате чего объект W может двигаться в проходе перемещения 2 вместе с передним концом винта 1 за счет перемещения последнего в проходе 2. В этом устройстве используется длинный гибкий винт 1 для увеличения величины перемещения винта 1 и увеличения поднимаемой величины объекта W. Центрирующие элементы 3, подвижно контактирующие с наружной периферией винта 1 с соответствующим шагом, служат для поддерживания винта 1 по всей его длине с соответствующими интервалами по центру прохода 2 и для предотвращения изгибания винта 1, обусловленного действием нагрузки от объекта W. Каждый из центрирующих элементов 3 имеет сквозное отверстие 3с для направления гибкого винта 1 по центру и фиксируется и поддерживается на стороне его наружной периферии с помощью средства, образующего проход 2 перемещения винта 1 поверхностью стенки, с тем, чтобы иметь возможность скользящего передвижения в направление перемещения, используя взаимодействие шпонки 2а со шпоночной канавкой 3b, как показано на фиг.1. Большое число центрирующих элементов 3 поддерживается в свою очередь ниже объекта W с помощью соединений 4, каждое из которых имеет заданную длину, в результате чего они могут перемещаться и располагаться с соответствующим шагом в проходе 2 перемещения за счет перемещения вверх вниз 1. Таким образом, винт 1 поддерживается с интервалами центрирующих элементов в проходе 2 перемещения, не вызывая смещения его центра в поисках координат. Это позволяет устранить продольный изгиб винта 1, обусловленный грузом W. Как описано выше со ссылками на фиг.3, в устройстве настоящего изобретения, использующем гибкий винт, центр винта 1 поддерживается центрирующими элементами 3 в проходе 2 перемещения, при этом передний конец 1а является направляющим в перемещении со стороны подачи. Кроме того, поскольку гибкий винт 1 может свободно перемещаться вперед и назад, поддерживаемый при этом в его средних частях с соответствующим шагом, перемещение самого прохода 2 перемещения 2 делается гибким (подвижным) с помощью средства, состоящего из телескопических цилиндров 6, 7. как показано в качестве приема на фиг.4, 5, в результате чего устройство настоящего изобретения может использоваться в качестве механизма перемещения для установки, содержащей телескопический проход 2 перемещения в качестве телескопической колонны. Пример устройства настоящего изобретения, содержащего средство, образующее проход 2 перемещения, служащее в качестве колонны, образованной телескопически соединенными цилиндрами, описывается ниже со ссылками на фиг.4 6. На фиг. 4 цифры 6, 7. соответственно обозначают части телескопически соединенных цилиндров, имеющих различные диаметры; цилиндр 7 имеет меньший диаметр и вставлен в цилиндр 6, имеющий больший диаметр с возможностью вертикального скольжения, но несъемно. Хотя весь телескопический цилиндр, образующий проход 2 перемещения в устройстве перемещения, не показаны на чертеже, однако большое число цилиндров, имеющих различные диаметры, последовательно и свободно вставлены также, как цилиндры 6, 7. показанные на чертеже, для образования телескопического цилиндра. Каждый из цилиндров 6, 7. телескопического цилиндра имеет нижнюю плиту или днище a, наружные фланцы b, c, выполненные на верхнем и нижнем концах, и внутренний фланец d на их верхнем конце. Наружный фланец c с нижнего конца вставленного цилиндра и внутренний фланец d верхнего цилиндра служит для запирания обоих цилиндров. Буквой e обозначено сквозное отверстие для гибкого винта 1, выполненное в центре днища d каждого цилиндра. В настоящем изобретении обычная телескопическая колонна имеет конструкцию, в которой ходовой винт поддерживается только основанием каждого из цилиндров и тем самым не имеет большого удлинения и большого соотношения свободной длины к радиусу инерции. Каждый из цилиндров 6, 7. образующих телескопический цилиндр и большое число центрирующих элементов перемещается синхронно с формированием прохода 2 за счет телескопического перемещения и размещения с соответствующим шагом для поддержания средней части длинного тонкого движущегося элемента в виде гибкого винта. Настоящее изобретение обеспечивает формирование телескопической колонны, имеющей большую величину перемещения, т.е. высокое соотношение свободной длины к радиусу инерции, что может быть реализовано с помощью известных устройств. Получаемая телескопическая колонна обладает прочностью на продольный изгиб и изгибной жесткостью, удовлетворяющих практическим целям. Как показано на фиг.6, каждый из центрирующих элементов 3 является таким же, как показаны на фиг. 1 и 3, в том плане, что каждый из них имеет размер, обеспечивающий его плотную установку в цилиндре 6 и в том, что каждый из центрирующих элементов 3 снабжен шпоночными канавками 3b, свободно взаимодействующими с выступающими шпоночными планками 2а, выполненными на внутренней поверхности цилиндра 6, и сквозным отверстием 3а, выполненным в его цилиндре, для свободного прохождения через него и направления гибкого винта 1. Центрирующие элементы 3 установлены в каждом из цилиндров 6, 7. имеющих различные диаметры соответственно, имеют наружные диаметры, соответствующие внутренним диаметрам цилиндров 6, 7. Для практического использования предпочтительно, чтобы каждое сквозное отверстие 3а и отверстие для свободного прохождения гибкого винта 1 имело бы втулку, изготовленную из из материала, обладающего низким сопротивлением скольжению, или вращающуюся втулку с подшипником, взаимодействующую с гибким валом 1 (на чертеже не показано). В конструкции, показанной на фиг.4, 5 три центрирующих элемента установлены в каждом из цилиндров 6, 7 являющихся составными элементами телескопического цилиндра. Каждый из центрирующих элементов 3 соединен с верхним центрирующим элементом 3 с помощью соединительной струны 4, а самый верхний центрирующий элемент 3 соединен с нижней поверхностью днища а меньшего цилиндра, вставленного в рассматриваемый цилиндр, с помощью соединительной струны 4. Число центрирующих элементов 3, устанавливаемых в одном цилиндре может быть любым в зависимости от длины каждого цилиндра и поднимаемой нагрузки. В вышеприведенной конструкции, цилиндры 6, 7. телескопического цилиндра последовательно вставляются так, чтобы цилиндр, имеющий меньший диаметр, свободно вставляется в цилиндр большего диаметра. Когда цилиндр, имеющий меньший диаметр, выдвигается вверх под действием перемещения вверх гибкого винта 1, то наружный фланец c на нижнем конце этого цилиндра взаимодействует с внутренним фланцем d на верхнем конце следующего цилиндра, имеющего больший диаметр. Нижние концы цилиндров меньшего диаметра последовательно взаимодействуют и тянут вверх верхние концы цилиндров большего диаметра для формирования прохода перемещения за счет телескопического движения. В устройстве настоящего изобретения, показанном на фиг.4, передний конец 1а (не показан) гибкого винта 1 может первым крепится к задней стороне днища ["a"] цилиндра, имеющего наименьший диаметр. Поскольку днища ["a"] всех остальных цилиндров и центрирующие элементы при этом имеют сквозные отверстия e и 3а соответственно для свободного прохождения через них винта 1, то последний подвижно удерживается по центру каждого из цилиндров за исключением самого верхнего цилиндра и проходит весь телескопический цилиндр. Хотя на фиг. 5 не показано, задний конец 1b гибкого винта 1 наматывается на приемный барабан, установленном в пространстве устройства, на котором смонтирован вертикально самый нижний цилиндр. Хотя на чертеже не показано, предпочтительно иметь трубу для свободного прохождения через нее гибкого винта через центр самого верхнего цилиндра вместо центрирующего элемента. С другой стороны, гаечный элемент установлен в отделении устройства, в результате чего вращение передается от двигателя 5d, снабженного системой передач, показанной на фиг.4. Система передач может иметь любую требуемую конструкцию. Работа устройства осуществляется следующим образом. В вышеприведенной конструкции, когда двигатель 5 нормально вращается и вращение передается гаечному элементу 5а в состоянии, когда цилиндры 6, 7. не выдвинуты, как показано на фиг.5, то перемещение вверх верхнего конца 1а (не показан) гибкого винта 1 начинается за счет вращения гаечного элемента 5а. В состоянии, показанном на фиг. 6, в котором телескопический цилиндр сложен, центрирующие элементы 3 в цилиндрах 6, 7. располагаются слоями между нижней стороной днища ["а"] верхнего цилиндра и верхней поверхностью днища а нижнего цилиндра. Перемещение вверх гибкого винта 1 вызывает перемещение вверх цилиндра, имеющего наименьший диаметр в следующем цилиндре, имеющим больший диаметр. Когда наружный фланец с на нижнем конце цилиндра, имеющего меньший диаметр, достигает внутреннего фланца b на верхнем конце цилиндра, имеющего больший диаметр, то цилиндр 6, имеющий больший диаметр, перемещается вверх за счет перемещения вверх гибкого винта 1. Перемещение гибкого винта 1 вверх заставляет цилиндры, имеющие меньший диаметр, последовательно перемещать вверх цилиндры, имеющие большие диаметры. Выдвинутый таким образом телескопический цилиндр имеет проход перемещения 2 для винта 1, сформированный в цилиндре и обеспечивается внешний вид раздвинутой вертикальной колонны. В то же время центрирующие элементы 3 в каждом из цилиндров 6, 7. перемещаются вверх в цилиндре, в котором центрирующие элементы 3 установлены, за счет перемещения вверх цилиндра выше рассматриваемого цилиндра и размещаются с равными шагами в соответствии с длиной каждого соединения 4, 4а. В процессе вышеуказанного удлинения, гибкий винт 1 перемещается вертикально вверх за счет центрирующих элементов, не вызывая каких-либо смещений в плоскости XY. Таким образом, гибкий винт 1 поддерживается в нескольких местах своей средней части с соответствующими интервалами с помощью днища а каждого цилиндра и большим числом центрирующих элементов 3, установленных в каждом из цилиндров 6, 7. Когда гибкий винт 1 удлиняется, сопровождая перемещение вверх каждого из цилиндров 6, 7. то многочисленные центрирующие элементы 3, установленные в каждом из цилиндров 6, 7. последовательно движутся в каждом из цилиндров и располагаются с соответствующим шагом в каждом из цилиндров 6, 7. Это значительно повышает прочность на продольный изгиб всего гибкого винта 1. В этом случае, каждый из цилиндров должен быть выполнен так, чтобы он имел толщину и диаметр, достаточные для противостояния боковой нагрузке. Однако, поскольку изгибная жесткость цилиндра пропорциональна диаметру в кубе и толщине, то эта цель достигается за счет применения цилиндра, имеющего относительно небольшую толщину и относительно большой диаметр в диапазоне, не создающем местного продольного изгиба, что приводит к снижению общего веса. Когда колонна, образованная выдвинутыми цилиндрами 6, 7. т.е. проход перемещения 2, сформированный телескопическим движением, складывается и складируется, то гаечный элемент 5 вращается в направлении, обратном тому, что при перемещении вверх, в результате чего передний конец 1а гибкого винта 1 движется вниз, а гибкий винт 1 наматывается на барабан в отделение устройства. Это приводит к тому, что цилиндры 6, 7. последовательно возвращаются и входят в цилиндры, имеющие большие диаметры. Когда цилиндры движутся вниз и сжимаются со стороны меньшего диаметра, то центрирующие элементы 3 в каждом из цилиндров, перемещаются в них в сторону их днища под действием днища а верхнего цилиндра, сопровождающего перемещение вниз каждого из цилиндров 6, 7. В устройстве перемещения настоящего изобретения, содержащим в качестве главных элементов гибкий винт 1, служащий в качестве движущегося элемента, гаечный элемент 5а, являющийся движущей силой перемещения, и центрирующие элементы 3, проход перемещения 2, образованный большим числом цилиндров 6, 7. составленных телескопически, формируется за счет телескопического перемещения, синхронно с движением винта 1. Устройство настоящего изобретения может использоваться, таким образом, как механизм телескопической колонны, содержащий телескопический цилиндр в качестве телескопической колонны. Когда каждый из цилиндров 6, 7. телескопического цилиндра имеет цилиндрическую форму, то запирающий механизма образуется за счет взаимодействия между шпонкой и шпоночной канавкой, соответственно выполненных на внутренней и наружной поверхностях каждого цилиндра. Однако, если каждый из цилиндров является угловой формы, то запирающий механизм не нужен. Наружная поверхность на нижнем конце каждого цилиндра и внутренняя поверхность на их верхнем конце может быть выполнена на конус для более близкого соединения соответствующих цилиндров, когда телескопический цилиндр образует вертикальную колонну за счет удлинения. На фиг.8 наглядно показано соединение всех цилиндров 6, 7. между собой. Однако на этой фигуре показана другая конструкция движущегося элемента 1. В качестве движущего элемента 1 использован выпуклый элемент (см. фиг.7, 8). В этом случае, приводная часть 5 перемещения содержит, например, приводной ролик 5h и прижимной ролик 5g, установленный напротив приводного ролика 5h с целью зажатия между ними выпуклого движущегося элемента 1 и для его перемещения вперед и назад. Цифрой 5i обозначен направляющий ролик. Форма сквозных отверстий 3а, выполненных в центре каждого днища а цилиндров 6, 7. и центрирующих элементов 3, соответствует форме в поперечном сечении движущегося элемента 1. Другие части являются такими же, как в устройстве на фиг.4-6. В устройстве перемещения настоящего изобретения проход 2 перемещения, образованный телескопическим цилиндром, выполнен так, чтобы обладать изгибной жесткостью, требующейся для гибкой конструкции, а движущийся элемент, гибкий винт, движущийся в проводе перемещения, выполнен так, чтобы иметь прочность на продольный изгиб, который может быть осуществлен весом цилиндра, собственным весом гибкого винта и нагрузкой от осветительной лампы или т.п. находящимся на верху телескопической колонны и действующим на нее в осевом направлении. Таким образом, проход перемещения и движущийся элемент обладают изгибной жесткостью и прочностью на продольный изгиб, которые требуются для гибкой конструкции. Например, большое число центрирующих элементов, скользящих в осевом направлении цилиндров и каждый из которых снабжен выполненным по его центру сквозным отверстием для гибкого винта, предусмотрено в каждом из цилиндров, формирующих проход перемещения, и соединены, например, с помощью плоской спиральной пружины и струны, в результате чего центрирующие элементы блокируют перемещение гибкого винта и располагаются с заданными интервалами, когда телескопическая колонна раздвигается. Прочность на продольный изгиб движущегося элемента может таким образом, существенно увеличиваться за счет функционирования центрирующих элементов по сравнению со случаем без центрирующих элементов. Это объясняется тем, что поскольку прочность на продольный изгиб гибкой конструкции обратно пропорциональна квадрату длины конструкции, что в общем известно, длина гибкого винта, связанная с прочностью на продольный изгиб, приближается к расстоянию между соответствующими центрирующими элементами, а не ко всей длине винта, благодаря центрирующим элементам для закрепления прохода перемещения для гибкого винта в центре каждого цилиндра, имеющего достаточную изгибную жесткость. Это положение было экспериментально подтверждено изобретателями. Хотя допустимая подъемная нагрузка винтового домкрата, имеющего по существу трапецеидальный винт, уменьшается с увеличением длины винтового стержня, если диаметр винтового стержня остается тем же, то наличие прохода перемещения и центрирующих элементов настоящего изобретения позволяет сохранить допустимую подъемную нагрузку постоянной несмотря на дину винтового стержня. Когда используется гибкий движущийся элемент, то настоящее изобретение имеет большое преимущество, заключающееся в том, что длинная телескопическая колонна может формироваться путем наматывания или подачи этого элемента. Поскольку гибкий подвижной элемент обычно обладает более низкой прочностью на продольный изгиб, чем жесткие подвижные элементы, то прочность на продольный изгиб должна быть увеличена за счет использования конструкции настоящего изобретения. Как отмечалось выше, в устройстве настоящего изобретения средство, образующее проход перемещения и движущийся элемент соответственно обладают изгибной жесткостью и прочностью на продольный изгиб, причем последняя может быть еще повышена путем сочетания подвижных центрирующих элементов. Таким образом, обеспечивается возможность получения идеальной длинной телескопической колонны, имеющей высокий коэффициент удлинения, легкий вес и большой нагружаемый вес. 2 4ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Устройство перемещения телескопической колонны, содержащее гибкий движущийся элемент, связанный с приводом с возможностью возвратно-поступательного перемещения, центрирующие элементы, каждый из которых выполнен с размещенным по центру сквозным отверстием для движущегося элемента, соединенные друг с другом с возможностью перемещения совместно с движущимся элементом и изменения расстояния между ними, и средство, образующее проход для поддержания и направления движения центрирующих элементов при их перемещении, отличающееся тем, что упомянутое средство образовано телескопически связанными между собой цилиндрами, движущийся элемент выполнен в виде гибкого винта с резьбовой канавкой на наружной поверхности, образованного путем наматывания узкого материала, имеющего соответствующую форму в поперечном сечении, в спираль, гибкий винт соединен передним концом с цилиндром наименьшего диаметра, а упомянутые цилиндры выполнены со сквозными отверстиями в днищах для свободного прохождения гибкого винта, при этом центрирующие элементы размещены в соответствующих цилиндрах, а упомянутый привод содержит вращающийся гаечный элемент, взаимодействующий с резьбовой канавкой гибкого винта со стороны его заднего конца. 2. Устройство по п.1, отличающееся тем, что на каждом центрирующем элементе и соответствующем цилиндре выполнены соответственно шпонки и шпоночные канавки для поддерживания и направления движения центрирующих элементов и предотвращения относительного вращения между ними. 3. Устройство по п. 1, отличающееся тем, что телескопически связанные между собой цилиндры выполнены в поперечном сечении некруглой формы, например эллиптической, угловой, звездообразной или аналогичной форм для предотвращения относительного вращения цилиндров. 4. Устройство по п.1, отличающееся тем, что центрирующие элементы соединены друг с другом с помощью плоской пружины, спиральной пружины или струны или сочетания такой пружины со струной. 5. Устройство по п.1, отличающееся тем, что оно снабжено средством для намотки и укладки гибкого винта при перемещении его назад и подачи и сматывания при перемещении его вперед. 6. Устройство по п. 1, отличающееся тем, что резьбовая канавка на наружной поверхности гибкого винта выполнена в поперечном сечении преимущественно круглой, трапецеидальной или треугольной формы. 7. Устройство по п.1, отличающееся тем, что внутри образованного путем наматывания узкого материала гибкого винта размещен стержень-сердечник, имеющий соответствующую форму в поперечном сечении или проволоки-сердечники.www.freepatent.ru
Геометрические размеры, жесткости, нагрузки. Расчет сечения колонны
4. РАСЧЕТНО-КОНСТРУКТИВНАЯ ЧАСТЬ.
4.1. Общие данные
Здание запроектировано с использованием серии 1.020-1/83. Каркас здания состоит из плит перекрытия, ригелей, колонн, диафрагм жесткости. Расчетная модель в ассматриваемом случае традиционно принимается следующей:
опирание плит перекрытия на ригеля шарнирное, ригеля, в свою очередь имеют шарнирное сопряжение с колоннами, колонны соединены с диафрагмами жесткости с помощью упругих связей (металлические закладные детали), устойчивость здания обеспечивается совместной работой диафрагм и примыкающих к ним колонн, а также дисков перекрытия, которые связывают все диафрагмы и колонны в единое целое, для того чтобы диск перекрытия мог воспринимать усилия в своей плоскости и выполнять роль связующего элемента необходимо тщательное замоноличивание всех швов в плитах перекрытии, в узловых соединениях ( ригель – колонна, межколонные плита – колонна ).
В дальнейшем будем предполагать, что все требования, относящиеся к описанной выше модели выполнены.
Ниже рассматривается определение усилий в колонне. Для этой цели используется метод конечных элементов (м.к.э.).
В качестве конечных элементов применяются:
стержневой к.э. для моделирования колонн, имеющий 6 степеней свободы в каждом узле к.э. Степени свободы представляют собой 3 линейных перемещения вдоль координатных осей и три угловых перемещения относительно этих же осей;
ригеля и межколонные плиты рассматривались как стержневые элементы, работающие в продольном (вдоль стержня) направлении, их роль в рассматриваемой модели только связевая, за исключением случаев, когда нагрузка непосредственно прикладывается на ригели, которые в этом случае с колонной связываются шарнирно (нагрузка от стен, лестничных клеток).
Традиционными для подобных расчетов являются допущения о линейной упругости материала конструкции и малости перемещении в сравнении с размерами конструкции.
Для определения усилии и перемещении использовалась сертифицированная программа расчета каркасных здании «SCAD».
4.2. Геометрические размеры, жесткости, нагрузки.
Сетка колонн непостоянная, максимальный размер 7.2x7.2м. Здание в плане имеет «Г» - образную форму, максимальные размерамы между крайними основными осями «1-8» и «А-К» ‑ 72.0x59.4 м., высота подвального этажа 3.3 м., магазина – 4.2м, жилых этажей – 3.0м, технического этажа и выхода на кровлю 2.8 м..
Колонны сечением 400x400 мм. Класс бетона колонн В40, В30 и В25. Жесткость колонн по высоте соответствует модулю деформации бетона и поперечному сечению элемента.
Диафрагмы жесткости (ДЖ) толщиной 140.00 мм. Класс бетона ДЖ – В25 на всю высоту здания. Наличие горизонтальных швов и упругих связей с колоннами снижает продольную и изгибную жесткость диафрагм. Учет этих факторов предлагается решать путем введения коэфф. условии работ, уменьшающего жесткость диафрагм. Здесь используется прием, изложенный в СниП II-22-81. Модуль продольной деформации определяется как величина равная Е = 0.8*α*k*R*1.1 = 198000 кг/м2 , где α- упругая характеристика (α=1500), k=2, R=75 (бетон марки 300, раствор марки 200), 1.1 (швы на расстоянии более метра). Для предварительного расчёта этими факторами пренебрежём, пологая что прочность горизонтальных швов ДЖ обеспечена бетоном колонны на срез и минимальным продольным усилием в колонне, а вертикального стыка колонны со стенкой – прочностью закладных деталей, количество закладных на этаж принималось равным трем.
Условная толщина диска перекрытия принята 120 мм, как приведенная толщина плиты перекрытии. Класс бетона перекрытия – В15.
Поперечное сечение ригелей принималась серийным (для высоты 450.00 мм) и соответствующее конкретному опиранию плит перекрытия (РОП и РДП). Это было сделано согласно предварительной схеме расположения плит перекрытия.
4.3. Нагрузки.
Собственный вес колонн, ригелей, диафрагм принят по фактическим, проектным размерам с объемным весом 2500 кг/м3 и коэфф. надежности по нагрузке 1.10 .
Собственный вес плит перекрытия входит в расчетную нагрузку на перекрытия.
Коэффициент по ответственности для всех нагрузок принять 0.95
Грузовая площадь для рассчитываемой колонны («Д»-«2») 43,56 м2, 8 этажей.
Нагрузки от покрытия (см. табл. 1).
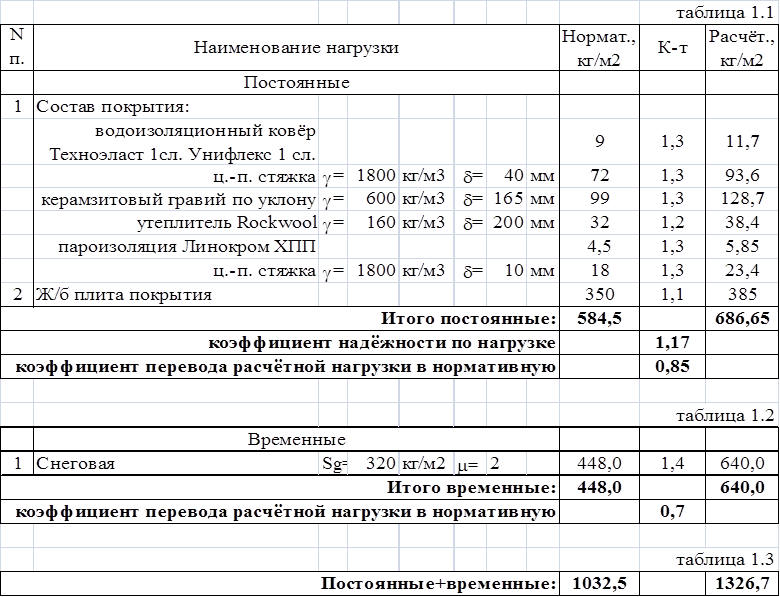
Нагрузки от перекрытия тех. этажа, см. табл.
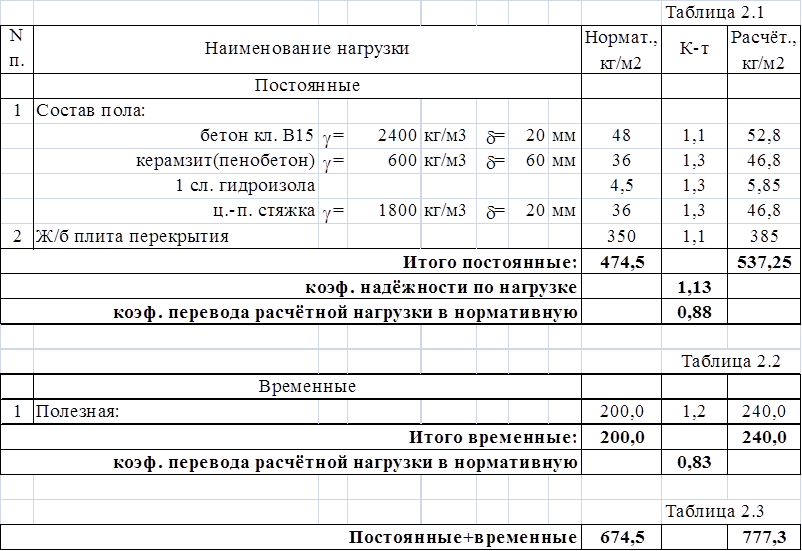
Нагрузки от перекрытий 2-10 этаж - квартиры, см. табл. 3..
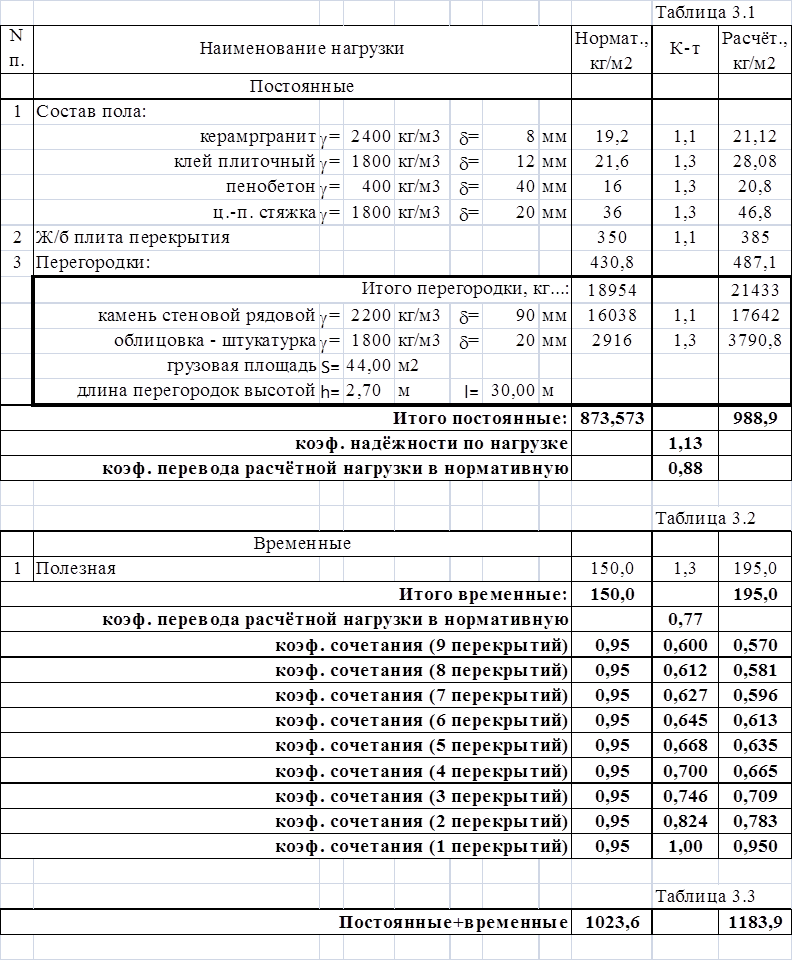
Нагрузки от перекрытия 1 этажа-магазин, см. табл. 4.
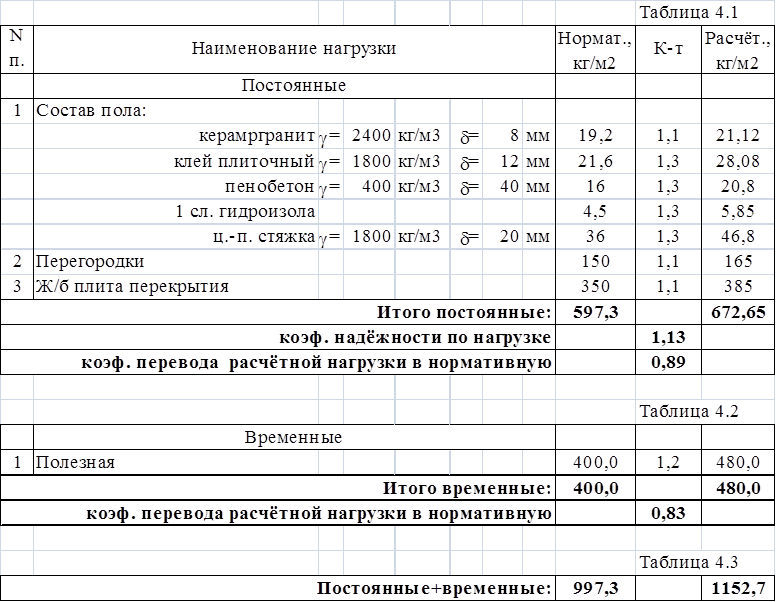
4.4. Расчет сечения колонны
Расчетная схема для центрально-сжатой колонны


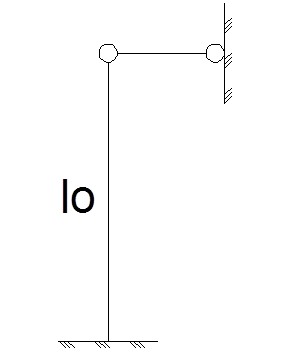
Рис.1. Расчетная схема колонны Рис.2. Схема загружения
Сечение колонны b x h =0,4 x 0,4м
Вид бетона: Тяжелый
Класс бетона: B40
Коэффициент условий твердения 1
Коэффициенты условий работы бетона
Учет нагрузок длительного действия b1 0,9
Результирующий коэффициент без b1 1
Трещиностойкость
Ограниченная ширина раскрытия трещин
Требования к ширине раскрытия трещин выбираются из условия сохранности арматуры
Допустимая ширина раскрытия трещин:
Непродолжительное раскрытие 0,4 мм
Продолжительное раскрытие 0,3 мм
Результаты расчета по комбинациям загружений
N = -404,34 Т
My = 2,318 Т*м
Qz = -1,102 Т
Mz = 1,005 Т*м
Qy = 0,665 Т
T = 0,078 Т*м
lo = 5,25 м


Определяем требуемую площадь сечения


Определяем случайный эксцентриситет

Принимаем  =0,017
=0,017
Коэффициент длительной части 0,903
Определяем радиус инерции колонны
Определяем гибкость колонны
 следовательно, расчет
ведем с учетом гибкости элемента.
следовательно, расчет
ведем с учетом гибкости элемента.
35< процент
армирования μ=0,5%
процент
армирования μ=0,5%

Момент инерции сечения
Относительный эксцентриситет

Минимально допустимый эксцентриситет

 <
< ,
,  =
= =0.2
=0.2
a=a’=0.03м
ho=h-a=0.4-0.03=0.376м
ea=0.017
e=0.16+0.017=0.177
Определяем моменты относительно центра тяжести арматуры.
Момент от действия длительной нагрузки


Определяем коэффициент влияния длительно действующей нагрузки на прогиб

Определяем момент инерции арматуры в сечении

Определяем критическую силу
Коэффициент продольного изгиба:
Расчетный эксцентриситет

Определяем требуемую площадь арматуры


Относительная высота сжатой зоны:
Граничное высота сжатой зоны:
 <
<

Принимаем из конструктивных требований
Предельная гибкость - 120
Сечение
|
b = 400 мм h = 400 мм a1 = 30 мм a2 = 30 мм |
S1 - 240 S2 - 240 Поперечная арматура вдоль оси Z 210, шаг поперечной арматуры |
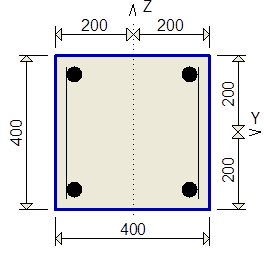
vunivere.ru
Удлинение - колонна - Большая Энциклопедия Нефти и Газа, статья, страница 2
Удлинение - колонна
Cтраница 2
Уд - коэффициент подачи, зависящий от удлинения колонны насосных штанг; Рп 6 15 см2 - площадь сечения плунжера ( см. прил. Остальные обозначения даны в условии задачи. [16]
Телескопическое соединение в составе комплекса обеспечивает компенсацию удлинения колонны лифтовых труб при изменении их средней температуры, защищает трубы от спирального продольного изгиба, предохраняя пакер от дополнительной нагрузки. [17]
Вследствие этого значительно увеличивается жесткость системы, уменьшается удлинение колонн под действием усилия запирания формы и снижается вероятность ее раскрытия под давлением материала, впрыскиваемого в полость формы; уменьшается также масса деталей, перемешаемых при замыкании и размыкании формы. [18]
В скважину соединение спускается в раскрытом положении и при удлинении колонны подъемных труб шток 3 двигается внутрь цилиндра /, компенсируя удлинение. [20]
Наличие перепада давления в трубках во время гидроперфорации приводит к удлинению колонны насосно-компрессорных труб. [21]
В скважину соединение спускается в раскрытом положении, и при удлинении колонны подъемных труб шток 3 двигается внутрь цилиндра 7, компенсируя удлинение. [23]
Из-за теплопроводности температура колонны выше зацементированного участка будет расти, обусловливая удлинение колонны, компенсирующееся изменением ее натяжения. В процессе промывки, цементажа и ожидания затвердевания цемента температура обсадной колонны меняется. В районах с высоким геотермическим градиентом нагрев колонны может привести к нежелательным нагрузкам. Приведены численные оценки нагрузок, действующих на колонну в процессе ожидания затвердевания цемента, и сформулированы предохранительные меры от перегрузок. [24]
В качестве исходных данных при определении температуры нагрева колонн под затяжку принимают удлинение колонны при той или иной температуре. Нагрев колонн обеспечивают электроподогревателями или паром. В последнем случае нагрев получается более равномерным. [25]
Устьевое шарнирное устройство 6, состоящее из трех шарниров, обеспечивает компенсацию удлинения колонны насос-но-компрессорных труб и подводящей линии паропровода. [26]
Вообще, если рост диаметра сопровождается возрастанием Н0, целесообразно одновременное с диаметром удлинение колонны. [27]
По принципу действия пакер ПТТГМ отличается о пакера ПТГМ тем, что обеспечивает компенсацию удлинения колонны труб за счет телескопического устройства. Между лакером и телескопическим устройством устанавливаются насосно-омл-реесорные трубы общей длиной не менее 350 м, которые служат для удержания ствола пакера от смещения вверх при действии перепада давления. Перед подъемом пакера замок 34 телескопического устройства необходимо присоединить к втулке 36 сальника. Для этого следует снять устьевую арматуру, присоединить к колонне труб дополнительную трубу и, опуская колонну, вращать ее вправо до полного свинчивания замка со втулкой. [28]
Задняя поперечина прикреплена к опорной плите, передняя - свободно покоится на салазках, что необходимо из-за некоторого удлинения колонн под нагрузкой и вследствие термического расширения. В задней поперечине установлен главный цилиндр, к плунжеру которого прикреплена прессующая ( подвижная) траверса. Кроме того, в задней поперечине установлены два возвратных цилиндра, которые своими штоками соединены с прессующей траверсой. К последней крепится сменный инструмент для выдавливания - штемпель. Движение иглы осуществляется от самостоятельного цилиндра рабочего хода и двух цилиндров для ее возврата. [29]
Соответствие глубин по стволу скважины г глубинам по вертикали г устанавливается по формуле гг - Дг, где Дг - удлинение колонны труб на глубине г; оно определяется по фактическим данным инклинометрии ствола скважины, а на стадии проектирования - расчетным путем. [30]
Страницы: 1 2 3 4
www.ngpedia.ru
Телескопические колонны
Строительные машины и оборудование, справочник

Категория:
Краны штабелеры
Телескопические колонныНа современных кранах-штабелерах, управляемых с пола (при грузоподъемное, и не менее 1,0 т) и из кабины, устанавливают телескопические колонны. Применение телескопических колонн позволяет: производить погрузку и разгрузку напольных транспортных средств, автомобилей, железнодорожного подвижного состава; обслуживать склады с разными отметками пола по высоте, например, склады с рампами; переносить грузы над препятствиями— оборудованием, перегородками.
Конструктивное исполнение телескопических колонн было и остается одним из наиболее сложных вопросов конструирования мостовых кранов-штабелеров в целом.
Телескопические двух- или трехсекционные колонны представляют собой комбинированную конструкцию, состоящую из элементов закрытого и открытого типов. Подъемная часть колонны может быть внутренней и наружной.
Широко применяют колонны с удлиненной кареткой, на которой жестко закреплен вилочный захват В верхней части каретки (подвижной секции) устанавливают блок или элементы крепления каната.
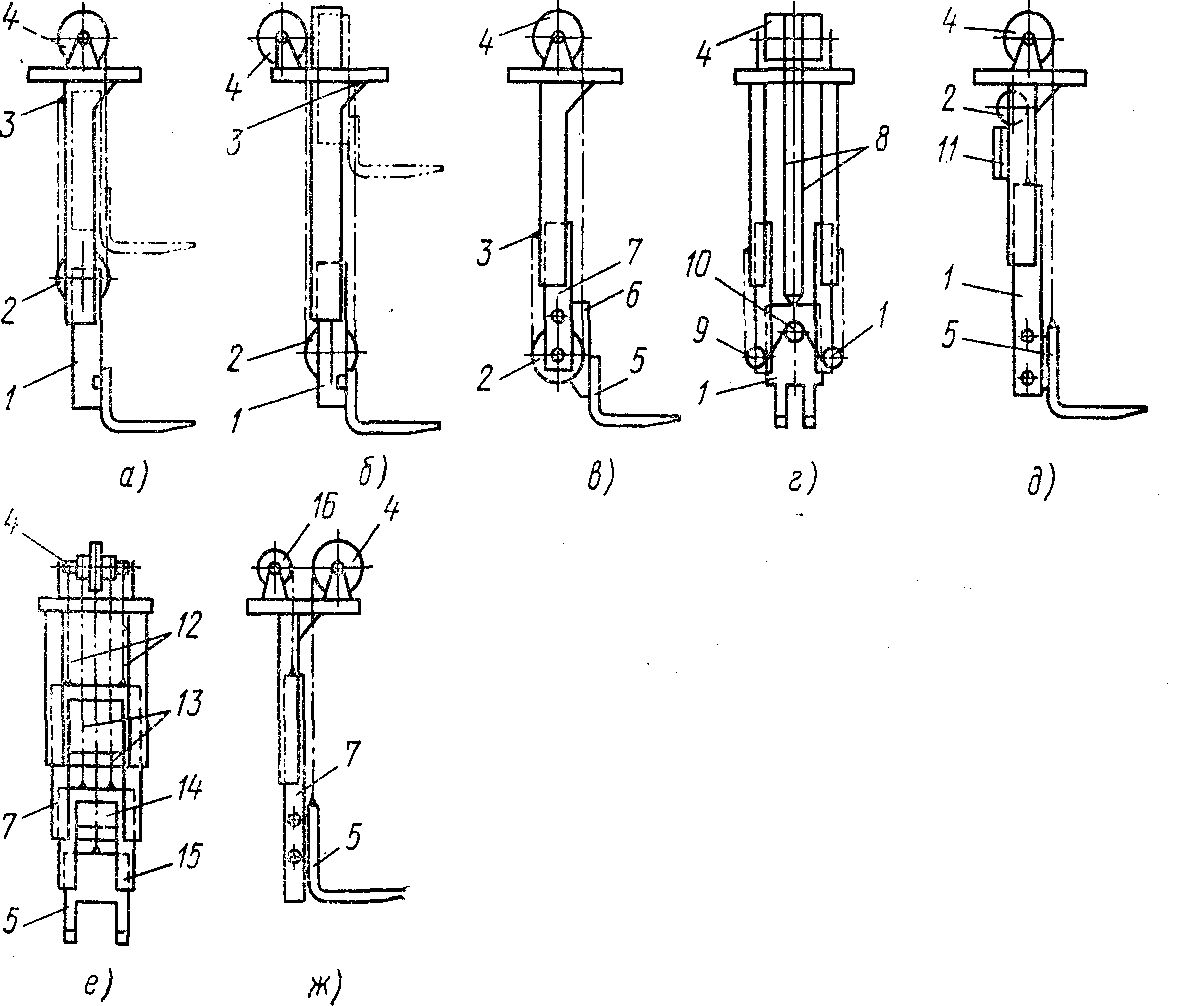
Рис. 1. Телескопические колонны:а, б — с удлиненной кареткой; в, г — с одной промежуточной подъемной секцией; д — с подъемной секцией, уравновешенной противовесом: е — многоступенчатая; ж — с промежуточной подъемной секцией, снабженной механизмом подъема
При использовании полиспастной подвески один конец каната крепят на поворотной платформе в точке, другой — на барабане механизма подъема. Колонны такой конструкции просты по устройству, но не позволяют полностью использовать высоту складского помещения под мостом крана. Колонны с удлиненной кареткой целесообразно применять для кранов, устанавливаемых для погрузки и разгрузки транспортных средств и временного штабелирования непосредственно в зоне экспедиции.
Высоту подъема груза для крана с удлиненной кареткой можно несколько увеличить, если продолжить направляющие колонны до высоты тележки и поднимать каретку через специальный проем в поворотной платформе. При этом, однако, появляется необходимость некоторого увеличения размеров опорно-поворотного устройства, а значит, и тележки.
На рис. 1, в показана колонна с подвижной секцией в нижней части которой размещен блок. Подъемный канат закреплен на жесткой секции колонны в точке проходит через нижний блок и направляется к механизму подъема. Вилочный захват связан специальным зажимом с подъемным канатом. При работе механизма подъема поднимаются одновременно захват и подъемная секция, причем скорость подъема захвата вдвое больше, чем подъемной секции.
Колонна, изображенная на рис. 1, г, отличается тем, что для подъема каретки и подвижной секции применены разные канаты. Каретка поднимается канатом, наматывающимся на барабан механизма подъема. Подвижная секция поднимается канатом, закрепленным на жесткой секции колонны. Канат перекинут через блок, установленный на каретке.
В некоторых случаях подвижную секцию уравновешивают подвижным противовесом, Секцию и противовес соединяют цепью или канатом, перекинутым через звездочку или блок. Механизм подъема при этом связывают непосредственно с вилочным захватом. Масса противовеса должна быть больше массы подвижной секции, но меньше суммарной массы секции и вилочного захвата. Такая конструкция позволяет уменьшить мощность привода механизма подъема, однако увеличивается масса системы и требуется тщательная пригонка подвижной и неподвижной секций и вилочного захвата, чтобы избежать заедания при опускании пустою захвата.
Несколько реже применяют многоступенчатые телескопические колонны, в которых каждая из подвижных секций и вилочный захват связаны непосредственно с механизмом подъема. Барабан механизма подъема выполняют в этом случае ступенчатым, так что часть барабана наибольшего диаметра связана канатом с вилочным захватом. Части барабана, имеющие меньшие диаметры, связываются канатами с подвижными секциями. Колонна такой конструкции позволяет максимально поднять нижнюю точку крана-штабелера над полом склада, что целесообразно при штабелировании груза. Соотношение диаметров выбирают таким, чтобы все подъемные элементы достигали крайних положений одновременно.
Известны телескопические колонны, снабженные не только механизмом подъема груза, но и механизмом подъема подвижной секции колонны. Вилочный захват при подъеме движется вместе с подвижной секцией до достижения последней своего верхнего положения. Дальнейший подъем захвата происходит при остановке подвижной секции.
Оригинальная конструкция телескопической колонны применена на мостовых кранах-штабелерах, выпускаемых Стахановским машиностроительным заводом. Часть колонны, которую крепят к тележке, имеет коробчатое сечение с тремя парами направляющих. По направляющим перемещаются катки подвижной секции колонны и кабины. Подвижная секция колонны имеет корытообразное сечение и оборудована двумя парами направляющих, а также соединительным устройством. При расположении захвата в нижнем положении ролики грузового захвата упираются в рычаги соединительного устройства, которые не могут повернуться, так как они соединены вертикальными тягами с У-образными рычагами, упирающимися роликами в боковые стенки колонны, благодаря чему грузовой захват и подвижная секция колонны поднимаются совместно. Когда подвижная секция приходит в крайнее верхнее положение, ролики У-образных рычагов входят в карманы. Так как У-образные рычаги воспринимают нагрузку от массы подвижной секции колонны, передаваемую вертикальными тягами, то они под действием этой нагрузки поворачиваются при входе роликов в карманы. При этом на такой же угол поворачиваются рычаги и занимают вертикальное положение, составляя одну линию с вертикальной тягой и освобождая место для движения грузового захвата, ролики которого теперь будут катиться по вертикальной тяге, запирая ее в пазу, образованном ребрами подвижной секции колонны. Грузовой захват продолжает подъем до верхнего положения, подвижная часть рамы остается на месте, удерживаемая У-образными рычагами, ролики которых вошли в выемки колонны.
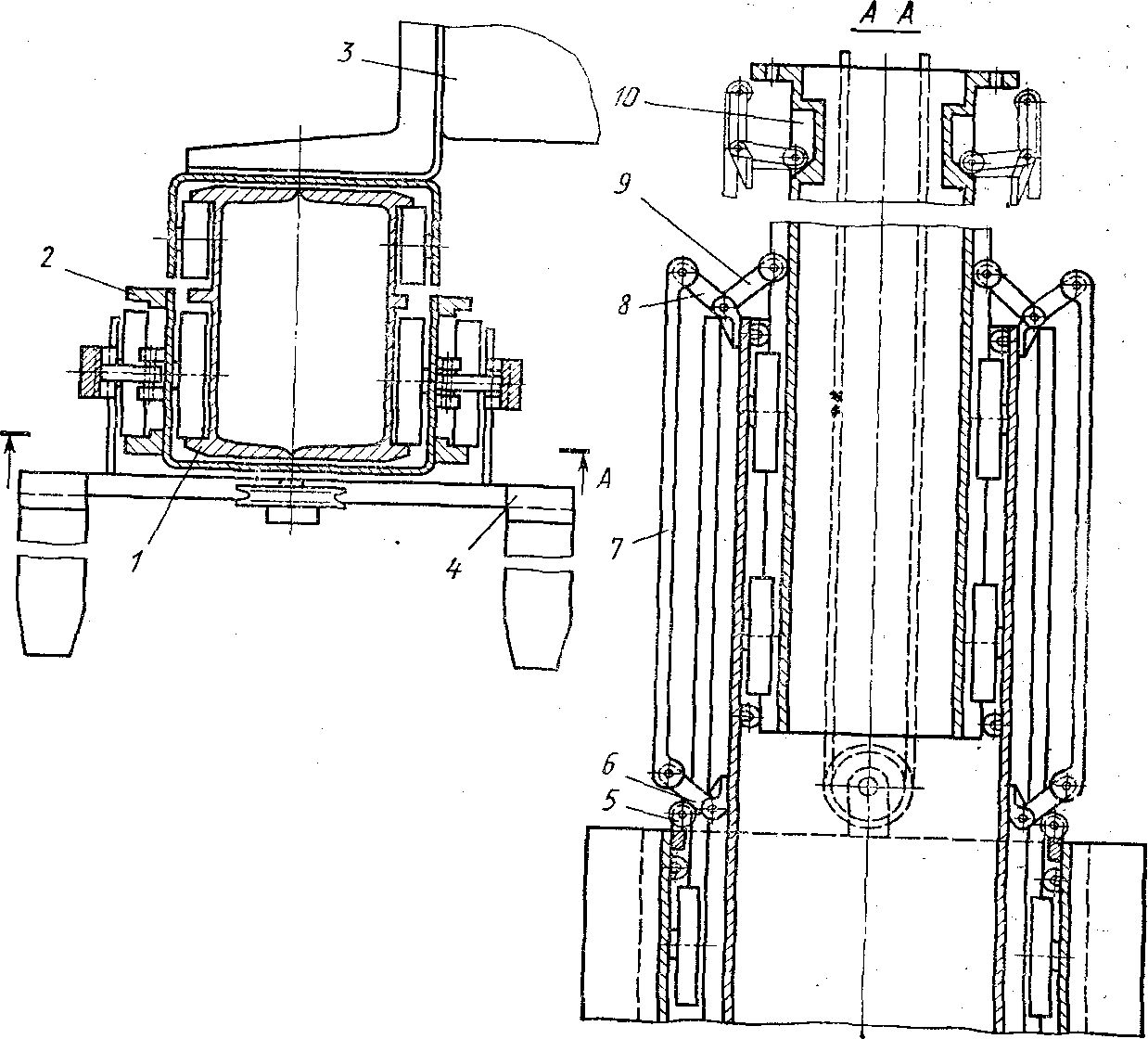
Рис. 2. Мостовой кран-штабелер, управляемый из кабины, грузоподъемностью 2,0; 3 2 и 5,0 т:а – общий вид; б – телескопическая колонна
Преимуществом телескопических колонн этой конструкции является постоянное расположение грузоподъемника внизу подвижной секции, что создает наилучшие условия для проведения погрузочно-разгрузочных работ (перемещение грузоподъемника по подвижной секции происходит только при верхнем положении последней, т. е. при загрузке верхних ячеек стеллажей).
Эта конструкция получила дальнейшее развитие. Во-первых, телескопические колонны новой конструкции имеют одно соединительное устройство вместо двух. Как показал опыт эксплуатации кранов-штабелеров, соединительные устройства нагружены неодинаково вследствие различных факторов, возникающих при изготовлении и эксплуатации кранов-штабелеров. Практически работает одно из них. При использовании одного соединительного устройства сокращается трудоемкость изготовления крана-штабелера, а также улучшаются условия эксплуатации.
Во-вторых, в телескопических колоннах новой конструкции направляющие для перемещения грузоподъемника расположены с внутренних сторон подвижной секции. Это создает условия для сокращения размеров колонны и для крепления кабины непосредственно к подвижной секции. В результате указанных изменений новая конструкция телескопических колонн компактнее и дешевле.
Телескопическая колонна состоит из: неподвижной секции коробчатой формы с выемкой в верхней части; направляющих, по которым перемещаются опорные катки и боковые ролики; средней подвижной секции, несущей опорные шарниры двух рычагов и тяг механизма блокировки с фиксирующим роликом, Причем один рычаг выполнен двуплечим. Средняя подвижная секция состоит из двух коробчатых балок с центрирующими втулками, которые обеспечивают соосность опорных катков и направляющих. Коробчатые балки соединены стяжками, которые попарно в вертикальной плоскости связаны пластинами. На конце коробчатых балок приварены направляющие опорных катков и боковых роликов нижней подвижной секции, имеющей коробчатую форму, к которой приварена рама с опорными осями вил. На нижней подвижной секции закреплены в верхней и нижней частях упорные ролики, запирающие среднюю подвижную секцию на неподвижной секции колонны, а также блочная подвеска, которая связана канатом с барабаном механизма подъема. К средней подвижной секции крепят кабину, рычажную систему клиновых ловителей и ограничитель скорости опускания кабины.
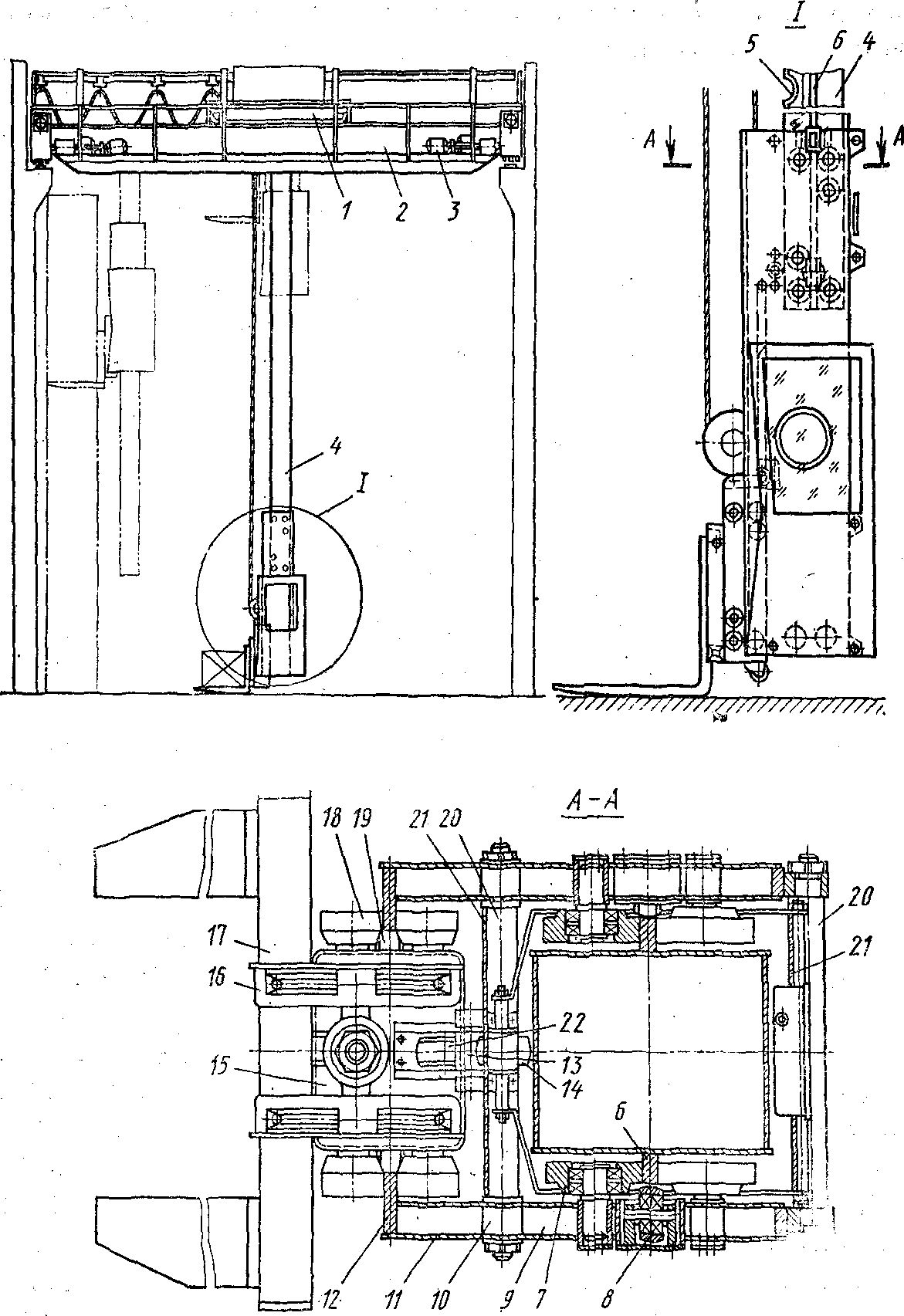
Рис. 3. Мостовой кран-штабелер с телескопической колонной новой конструкции:1 — тележка; 2 — мост; 3 — двигатели; 4 — неподвижная секция; 5 — выемка; 6, 12 — направляющие; 7, 18 — катки; 8, 12 — боковые ролики; 9 — средняя подвижная секция; 10 — центрирующие втулки; 11 — балки; 13 — тяга; 14 — фиксирующий ролик; 15 — нижняя подвижная секция; 16 — блочная подвеска; 17 — рама; 20 — стяжки; 21 — пластины; 22 — упорные ролики
Принцип работы телескопической колонны заключается в следующем. Груз, установленный на вилы, а следовательно, и нижняя подвижная секция поднимаются механизмом подъема через блочную подвеску. При этом верхний упорный ролик упирается в один рычаг и через тягу и другой рычаг прижимает фиксирующий ролик, который перекатывается по передней стенке неподвижной секции, т. е. происходит одновременное перемещение по вертикали средней подвижной секции и нижней. В крайнем верхнем положении средней подвижной секции фиксирующий ролик западает в выемку неподвижной секции и запирает среднюю подвижную секцию на неподвижной секции. При этом рычаги складываются, тяга перемещается в сторону передней стенки неподвижной секции, упорный ролик перемещается по тяге, и нижняя секция начинает перемещаться относительно средней (в данном случае неподвижной) секции в крайнее верхнее положение. Когда верхний упорный ролик сходит с тяги, то он должен зайти на нее для удержания фиксирующего ролика в закрытом положении, т. е. расстояние между упорными роликами должно быть меньше длины тяги механизма блокировки. При опускании нижняя подвижная секция перемещается относительно средней (пока неподвижной) секции, верхний упорный ролик сходит с тяги, при этом фиксирующий ролик под действием силы тяжести средней подвижной секции выходит из выемки и происходит одновременное опускание средней и нижней подвижных секций относительно неподвижной секции.
Предлагаемая конструкция телескопической колонны позволяет обеспечить точность сборки, а также улучшить обслуживание и ремонт крана-штабелера.
Читать далее: Общая компоновка кранов-штабелеров
Категория: - Краны штабелеры
Главная → Справочник → Статьи → Форум
stroy-technics.ru
Телескопическая колонна
О П И С А Н И Е ()727543
ИЗОБРЕТЕН ИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советских
Социалистических
Республик (61) Дополнительное к акт. свил-ву— (5))М. Кл. (22} Заявлено 31.10.77 .(21) 2538856/29-11
В 65 G 61/00 с присоединением заявки №
Государственный комитет
СССР (23) Приоритет— но делам изобретений н открытий (53) УД К621.876 (088.8) Опубликовано 15.04.80. Бюллетень № 14
Дата опубликования описания 15.04.80 (72) Авторы изобретения
Б. И. Певзнер и А. И. Ващенко
Центральное конструкторское бюро автоматизации и механизации
Министерства тяжелого и транспортного машиностроения (71) Заявитель (54) ТЕЛЕСКОПИЧЕСКАЯ КОЛОННА
Изобретение относится к подъемно-транспортным машинам, в частности к кранам-штабелерам, Известна телескопическая колонна, содержащая неподвижную секцию, среднюю подвижную
5 секцию и нижнюю подвижную секцию с опорными катками и грузовым захватом, механизм ее перемещения, механизм блокировки средней подвижной секции, взаимодействующий с выемкой, выполненной в верхней часпт неподвижной секции .(1).
Однако средняя подвижная секция выполнена С-образной формы, колонна трудоемка в изготовлении, имеет недостаточную жесткость и большие габаритьь
Цель изобретения — увеличение жесткости колонны и компактности.
Эта цель достигается тем, что средняя секция предлагаемой колонны выполнена в виде прямоугольника с двумя консолями, свободные концы которых снабжены пластинами с выступающими концами, служащими направляющими для опорных катков нижней подвижной секции, расположенной между консолями.
Средняя подвижная секция выполнена из двух коробчатых балок, соединенных в вертикальной плоскости стяжками, на которых смонтирован механизм блокировки.
На фиг. 1 показана трехсекционная телескопическая колонна, вид сбоку; на фиг. 2— узел I на фиг, 1; на фиг. 3 — тот же узел, вид спереди; на фиг; 4 — разрез A-А на фиг, 2; на фиг. 5 — разрез Б-Б на фнг. 3; на фиг. 6— положение, при котором средняя секция неподвижна, а нижняя секция перемещается по ней.
Телескопическая колонна крепится к поворотной платформе тележки 1, перемещаемой вдоль моста 2, а мост привода .н 3 перемещается вдоль склада.
Телескопическая колонна состоит из неподвижной секции 4 коробчатой формы с выемкой 5 в верхней части и направляющих 6, по которым перемещаются опорные катки 7 и боковые ролики 8 средней подвижной секции 9, несущей опорные шарниры )О (фиг. 5 и 6) рычагов ll и 12, тяги 13 механизма блокнровтсн с .фиксирующим, роликом 14. Причем ры,чаг 12 выполнен двуплечим. Средняя лоцвиж3 72754 ная секция 9 состоит иэ двух коробчатых балок 15 (фиг. 4) с центрирующими втулками 16, которые обеспечивают соосность опорных катков 7 и направляющих 17. Коробчатые балки 15 соединяются между собой стяжками 18, соединенными попарно в вертикальной плоскос. ти пластин ми 19, На конце коробчатых балок
15 приварепы направляющие 17 опорных катков 20 и боковых роликов 21 нижней подвижной секции 22, имеющей коробчатую форму, 1о к которой приварена рама 23 с опорными осями 24 вил 25. На нижней подвижной секции
22 закреплены в верхней и нижней части упорные ролики 26, запирающие среднюю подвижную секцию 9 на неподвижной секции 4 колон- 15 ны, а также блочная подвеска 27, соединенная канатом 28 с барабаном механизма подъема.
К средней подвижной секции 9 крепится кабина 29, рычажная система 30 клиновых ловителей и ограничитель 31 скорости опускания ка- 20 бины.
Принцип работы телескопической колонны заключается в следующем. Груз, установленный на вилы 25, а следовательно, и нижняя секция
22, поднимаются механизмом подъема через блочную подвеску 27 и канат 28, при этом верхний упорный ролик 26 упирается в рычаг
11 (фиг. 5) и через тягу 13, рычаг 12 прижимает фиксирующий ролик 14, который перека тывается по передней стенке неподвижной сек- 30 ции 4, т.е. происходит одновременное перемещение по вертикали средней подвижной секции 9 и нижней подвижной секции 22. В крайнем верхнем положении средней подвижной секции 9 (фиг. 6) фиксирующий ролик 14 западает в з5 выемку 5 неподвижной секции 4 и запирает .среднюю подвижную секцию 9 на неподвижной секции 4, при этом рычаги 11, 12 складываются, тяга 13 перемещается в сторону передней стенки неподвижной секции 4, упорный 40 ролик 26 перемещается по тяге 13, и нижняя секция 22 начинает перемещаться относительно средней (в данном случае неподвижной, фиг,б) секции 9 в крайнее верхнее положение, причем когда верхний упорный ролик 26 сходит с тя- 45 ги 13, второй упорный ролик 26 должен зайти на тягу 13 для удержания фиксирующего
,ролика 14 в закрытом положении, т.е. рассто3 яние между упорными роликами 26 должно быть меньше длины тяги 13 механизма блокировки. При опускании нижняя подвижная секция 22 перемещается относительно средней (пока неподвижной) секции 9, вержний упорный ролик 26 сходит с тяги 13, при этом фиксирующий ролик 14 под действием веса средней подвижной секции 9 выходит из выемки 5 и происходит одновременное опускание средней подвижной секции 9 и нижней подвижной секции 22 относительно неподвижной секции 4.
Предлагаемая конструкция телескопической колонны за счет наличия на средней подвижной секции 9 стяжек, 18, соединенных попарно в вертикальной плоскости пластинаьл. 19, увеличивает ее жесткость и позволяет совместно обрабатывать коробчатые балки 15 с последующей их сборкой, что обеспечивает точность сборки, упрощается конструкция механизма блокировки, а расположение его в передней части колонны улучшает обслуживЯпие и ремонт, Формула изобретения
1. Телескопическая колонна, содержащая неподвижную секцию, среднюю подвижную секцию и нижнюю подвижную секцию с опорными катками и грузовым захватом, механизм ее перемещения, механизм блокировки средней подвижной секции, взаимодействующий с выемкой, выполненной в верхней части неподвижной секции, отличающаяся тем, что, с целью увеличения жесткости колонны и компактности, средняя секция выполнена в виде прямоугольника с двумя консолями, свободные концы которых снабжены пластинами с выступающими концами, служащими направляющими для опорных катков нижней подвижной секции, расположенной между консолями.
2. Колонна цо п, 1, о т л и ч а ю щ ая с я тем, что средняя подвижная секция выполнена из двух коробчатых балок, соединенных в вертикальной плоскости стяжками, на которых смонтирован механизм блокировки.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР я"" 239517, кл. В 66 F 9/08, 29.02.68 (прототип).
Составитель И. Федосова
Техред Ж.Касхелевич Корректор М Пожо
Редак ор И. Марголис
Тираж 914 Подписное
ЦНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб,, д. 4/5
Заказ 1058/19
Филиал ППП "Патент", г. Ужгород, ул, Проектная, 4






www.findpatent.ru